Self-Supervised Learning for Stereo Matching with Self-Improving Ability
这篇paper关注的是自监督双目匹配。重点在于不需要点云监督,而且在新场景测试的时候可以重新迭代进步。
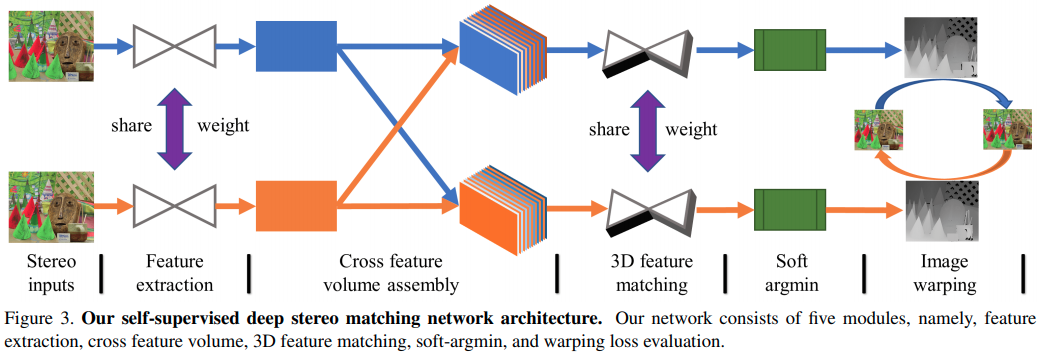
网络结构
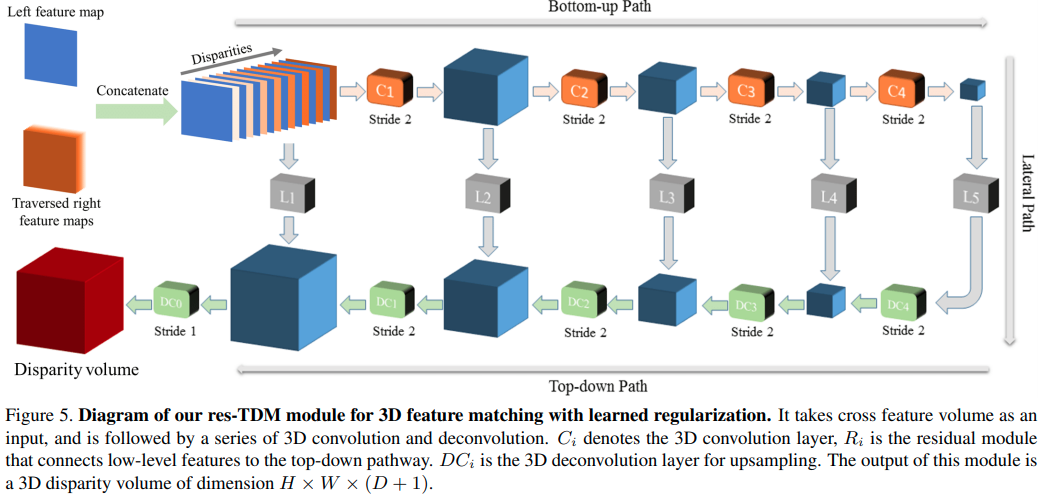
其中的feature mapping
左右目分别运行对称的网络。
损失函数
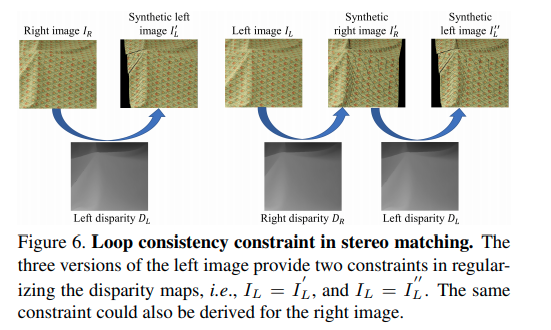
左右图生成一致性
分三项,分别是SSIM,左图,图片梯度。
def SSIM(self, x, y):
C1 = 0.01 ** 2
C2 = 0.03 ** 2
mu_x = nn.AvgPool2d(3, 1)(x)
mu_y = nn.AvgPool2d(3, 1)(y)
mu_x_mu_y = mu_x * mu_y
mu_x_sq = mu_x.pow(2)
mu_y_sq = mu_y.pow(2)
sigma_x = nn.AvgPool2d(3, 1)(x * x) - mu_x_sq
sigma_y = nn.AvgPool2d(3, 1)(y * y) - mu_y_sq
sigma_xy = nn.AvgPool2d(3, 1)(x * y) - mu_x_mu_y
SSIM_n = (2 * mu_x_mu_y + C1) * (2 * sigma_xy + C2)
SSIM_d = (mu_x_sq + mu_y_sq + C1) * (sigma_x + sigma_y + C2)
SSIM = SSIM_n / SSIM_d
return torch.clamp((1 - SSIM) / 2, 0, 1)
规范化
平稳性,图片二次梯度
循环一致性
Maximum-Depth Heuristic
最小化dispairty的总和。
自提升
在测试的时候可以进一步fine-tune网络。性能还能提升