A Convolutional Network for Joint Deraining and Dehazing from A Single Image for Autonomous Driving in Rain
这篇论文是iros2019的论文,在实验室的NAS上有PDF版本。这篇论文在人工合成的city-scape数据集上对单个图片进行derain与dehaze。将这两个问题一起研究的motivation是雨滴本身会使得场景中带有光的散射,形成雾等扭曲的光效果,所以在雨天自动驾驶场景中应该对两个部分同时进行矫正。本文提出的模型速度很快,对的图片处理时间仅仅只有0.05s.
数学模型
经典的模型中雨天图像的形成可以用下式的模型描述:
其中为下雨图片,为目标还原图片,为相机附近的雨滴,为与图片中物体与相机距离有关的不被干扰的光的比例,A是表达雾的模糊亮度的一个全局值,很多模型尝试对建模,把设置为一个固定值,但是我们会发现与还是有相关性的。这里对原来的公式进行重新表达。 其中 如此我们对每一个像素点直接估计本质上就是完成了一式的,这里的经验是对学习的时候直接学习
网络模型
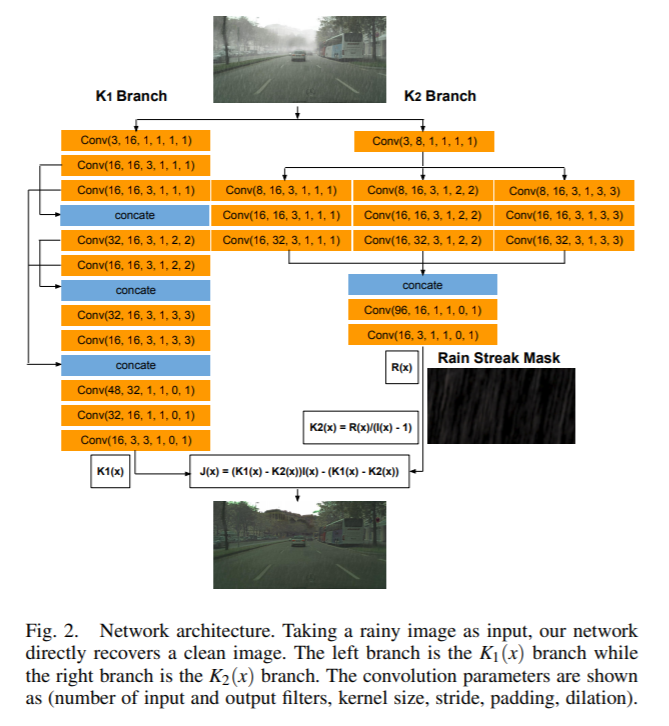
数据的产生
事实上我们很难得到下雨、不下雨的数据对(几乎不可能,只能依靠定点拍摄,这种采集方式使得场景比较少),这里最后选择的是使用合成数据集。首先有CityScapes数据集,然后有foggy-Cityscapes合成数据集(这个数据集其实很有意思,其生成方式可以一读),这个数据集基于CityScapes并加上了雾化的效果。然后作者以此为基础,对每一张图根据一个教程加上了不同方向不同强度的雨水效果,形成新的数据集。
实验
这里谈及实验的原因,主要是因为本文在验证自己的重建性能的时候,除了在网络中验证重建误差,还进行了高阶任务的实验,也就是让物体检测以及语义分割预训练网络在原图、合成图、还原图上分别运行测试,实验发现在还原图上得到的性能点数一般都比合成图上的高。值得注意的是本文并没有进行fine-tune。