IoU Loss for 2D/3D Object Detection
这篇论文的核心贡献是给出了所谓的IoU Loss,因为拼点的过程中关键点在于提升IoU的值,但是我们目前没有直接梯度优化IoU的方法,这篇文章给出的IoU Loss就是给出一个可微分的损失函数,通过直接优化IoU提高分数
一般带有旋转的2D IoU算法
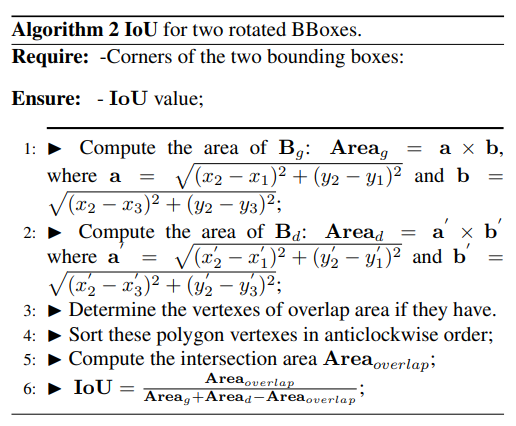
- 计算两个平面区域的面积
- 找出两个区域相交得到的凸多边形的点,这些点有两种来源可能,一个是两个box边缘的交点,一个是出现在另一个bbox区域中的原来box的点
- 将这些凸多边形的边缘点逆时针或者顺时针排序,算法是:先求出凸多边形的中心点,然后逐个求出旋转角度,然后将这个旋转角度排序
- 将凸多边形分解为多个小三角形,并求出总合面积
- 得到overlap面积后求出IoU
3D IoU
只需要在求出over lap的基础上,在高度上补充一些参数即可: