Deep Multi-Sensor Lane Detection
这篇论文给出用lidar和图片两者共同进行学习侦测道路线的算法
关键点:
- 作者用图片示例说明,即使在相机坐标系(图片)中实现了近乎完美精确的road-segmentation,转换到俯视图的时候精确度仍然很低,所以需要用俯视图直接处理。
- 输出的俯视图中每一个像素代表的是该点距离最近道路线的距离。与直接segmentation相比,可以缓解输出结果仅与结果稍稍offset时的loss过大等的问题。
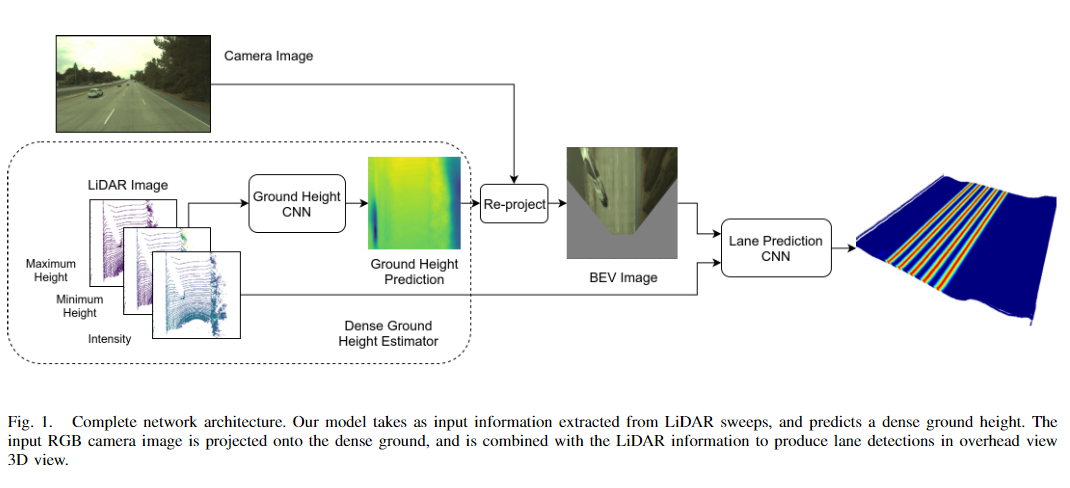
- 点云识别路径时,地面点过于稀疏,所以需要数个点云测量结果合并一起使用,然后压在平面图中输入CNN。