UniOcc: Unifying Vision-Centric 3D Occupancy Prediction with Geometric and Semantic Rendering
这篇paper提出了不使用3D occupancy labeling 完成 3D occupancy Prediction训练的方案, 基本思路是用NeRF对相邻帧进行语义分割与深度渲染。然后使用雷达点在图片上的投影完成监督。
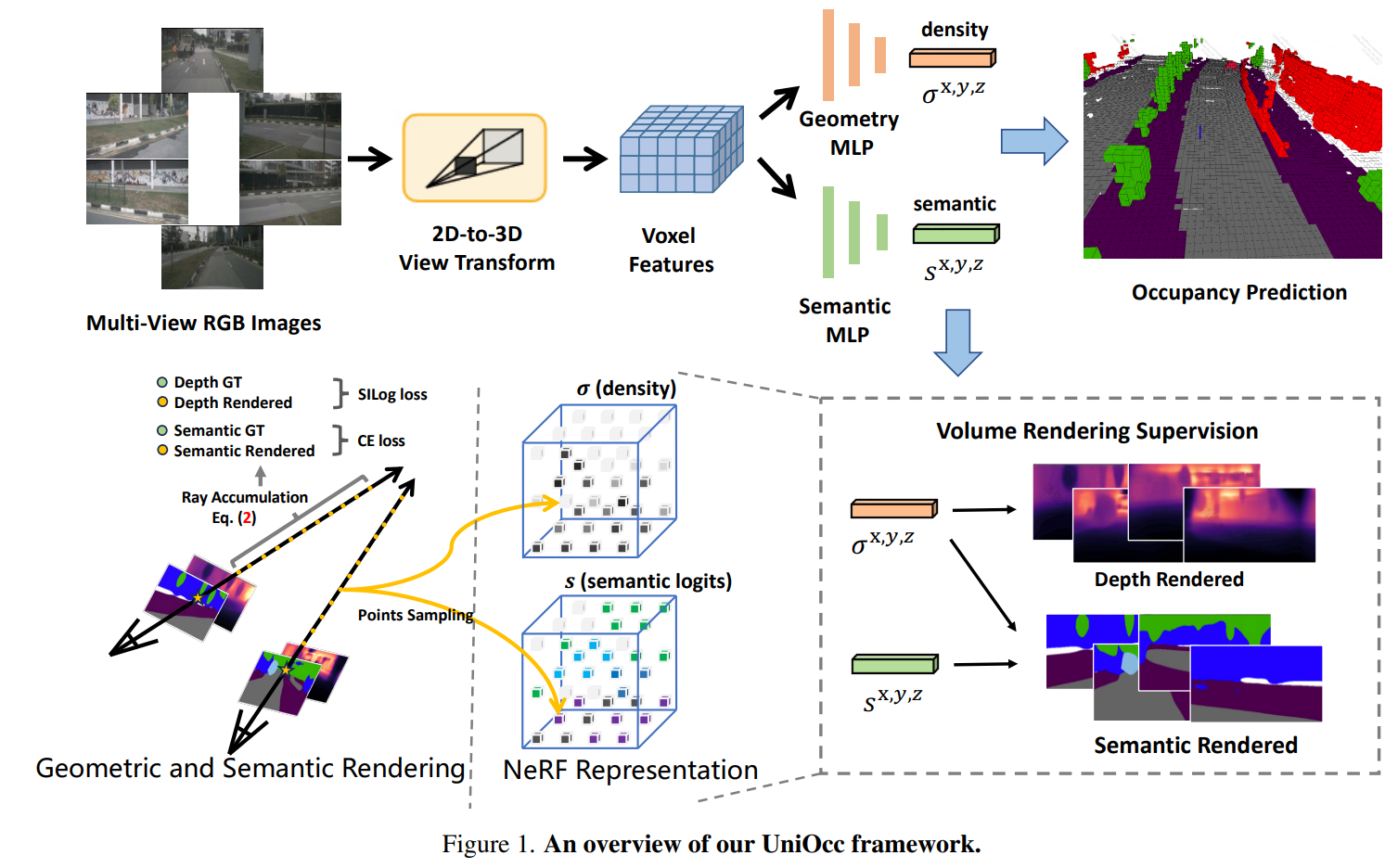
Rendering Supervision
使用LSS输出一个三维体素, 使用两个分开的MLP网络对每一个点预测occupancy prediction 和 Segmentation label.
渲染采用NeRF中常用的光线采样方案:
使用SILoss 和 CELoss分别监督深度渲染和语义分割渲染。
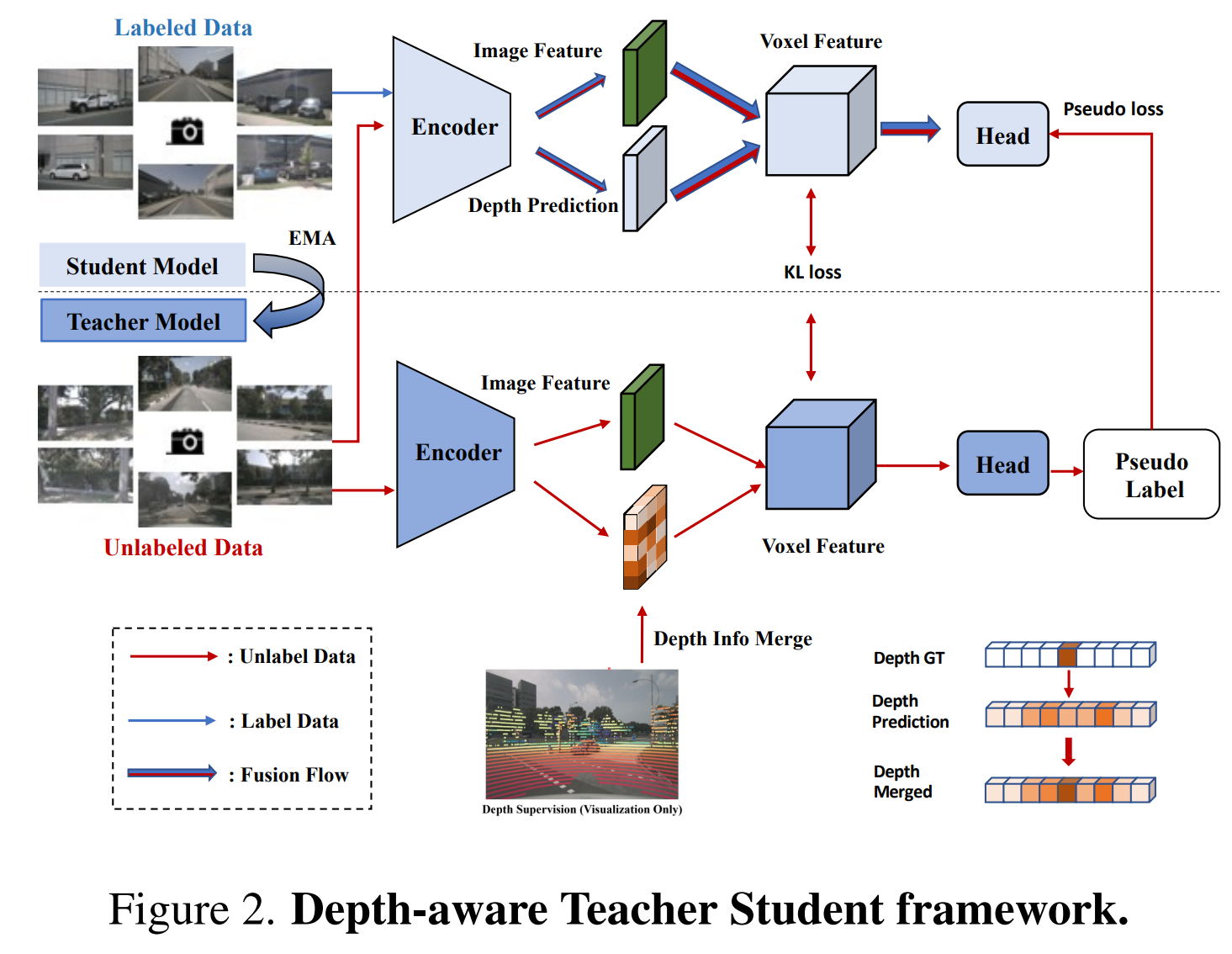
Depth Aware Teacher Student
对于没有标注的数据,使用一个自监督方案补充监督如图:
Other Settings
- Using Semantic label,去除时序过程中可能的动态物体(车和人)
- 使用 visibility mask, 判断当前要推断的点是否超出了现有Voxel的范围,并减少对这部分点的监督。可以提升点数,但是会损失可视化效果(相当于没有对天空部分的点作正确监督)。