Summary of NIPS 2020 for application
这个页面和 NIPS 2020 for NN相比,看的更多是网络具体应用上的实验,而不是理论.
Displacement-Invariant Matching Cost Learning for Accurate Optical Flow Estimation (DICL)
这篇paper提出的是使用concat的结构去进行光流的估计. 这个方法在双目中很常见,但是在光流中不常见。主要原因是光流中需要在二维平面内进行大规模的搜索,因而用concat-based的cost volume内存占用很大,也会很慢。
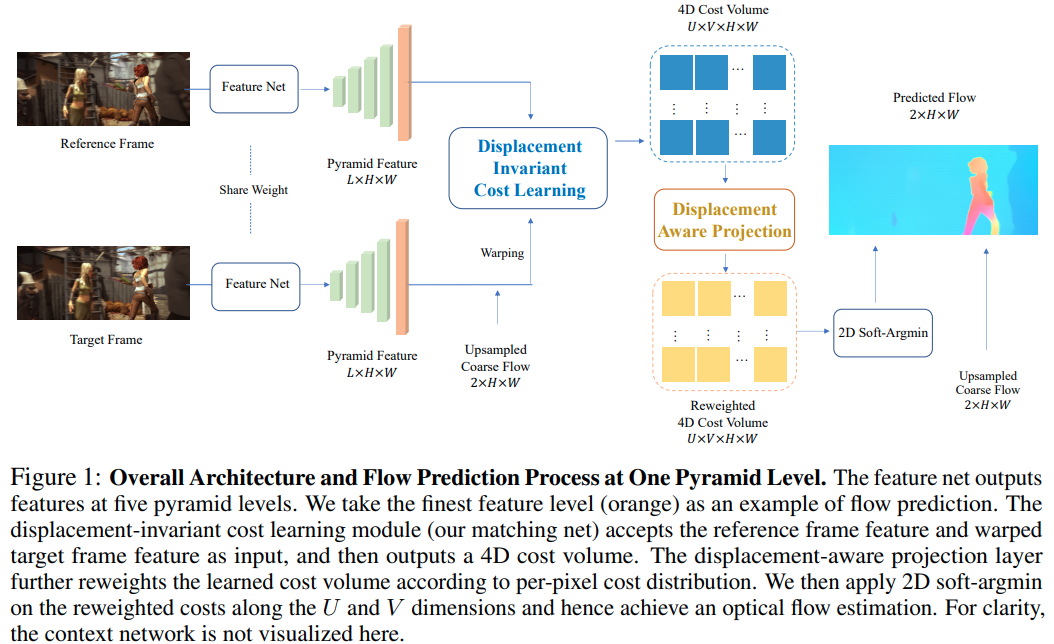
这篇paper使用的是 concat-based的cost volume.
这个cost volume的输入为两张的图片特征, 将target图多次平移(x, y, 正负)并与reference图concat 输出的大小为 其中分别为竖直与水平的搜索范围.
然后将 全部merge到一个维度上,对作卷积,输出cost , 再复原到.
An End to End Network Architecture for Fundamental Matrix Estimation
立体视觉中两个相机拍到的图片中的对应点满足 , 其中为epipolar line. 就是 fundamental matrix (指三维矢量叉乘转点乘).
传统来说需要keypoint detection, matching, eight-point estimation这样的流程.
这篇paper采取的是比较暴力运算的方案(并非完全新,但是有新意).
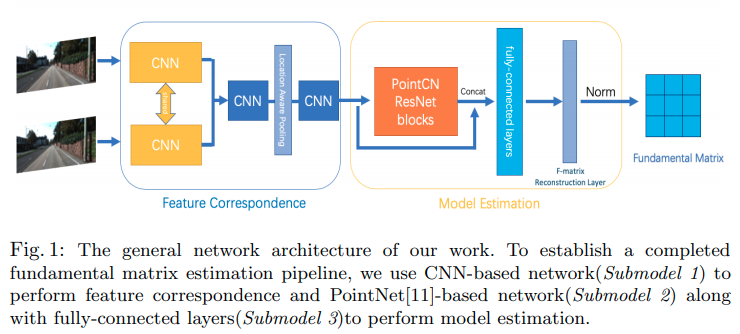
- contractive learning, 用CNN学习,让两张图对应keypoint距离近,不对应keypoint距离远,参考UCN.LAP是Location Aware Pooling,这篇也是重要的前置论文.
- 对每一个pixel算全连接,这边称为pointnet结构,得到每个pixel成为可靠keypoint的概率, 用于所谓去除out-lier
- 最后的估计采用的是全连接,回归的参数有八个 ,F的预测值是.
- 训练loss, 一个是对的 loss,另一个是所有keypoint的残差
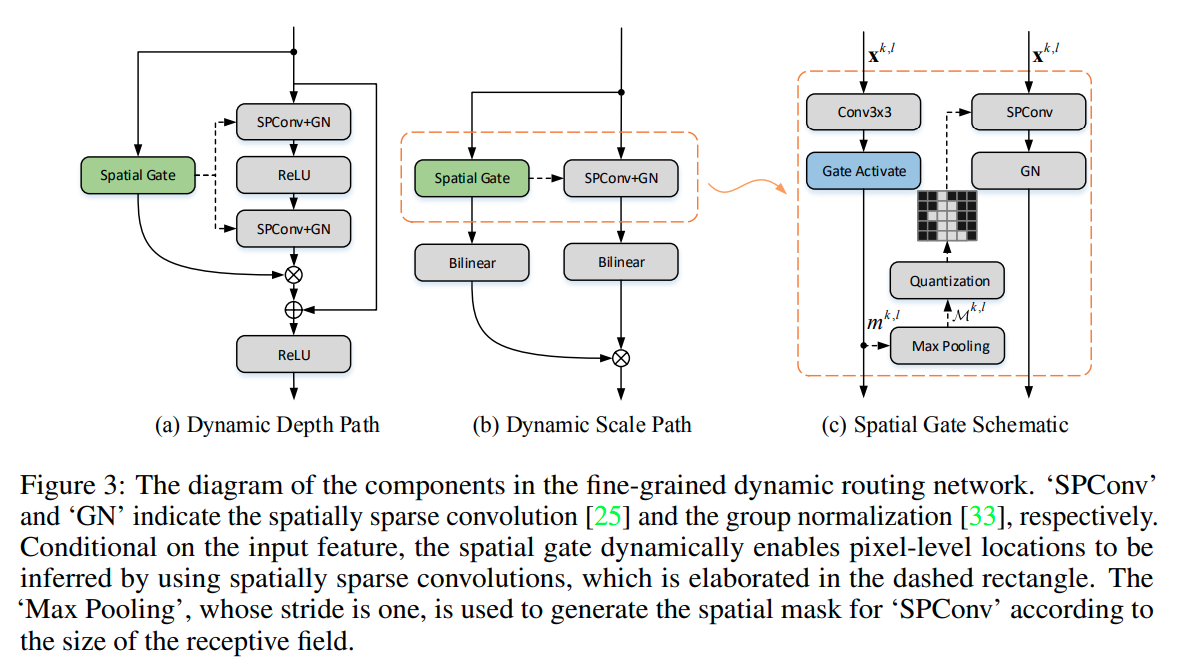
Fine-Grained Dynamic Head for Object Detection
Motivation就是想在FPN的基础上不同Scale的特征能够互相融合:
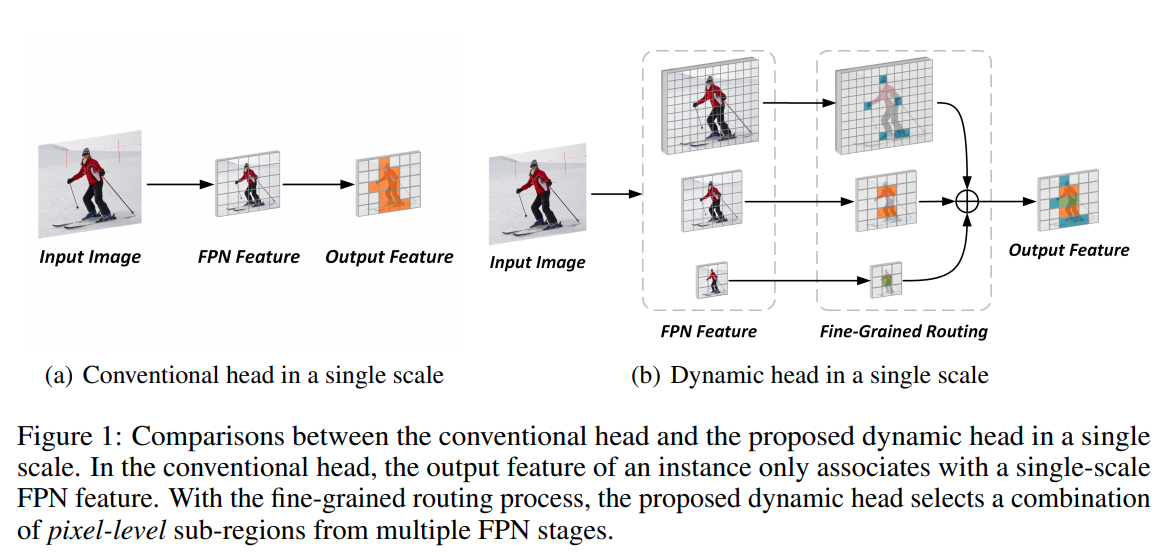
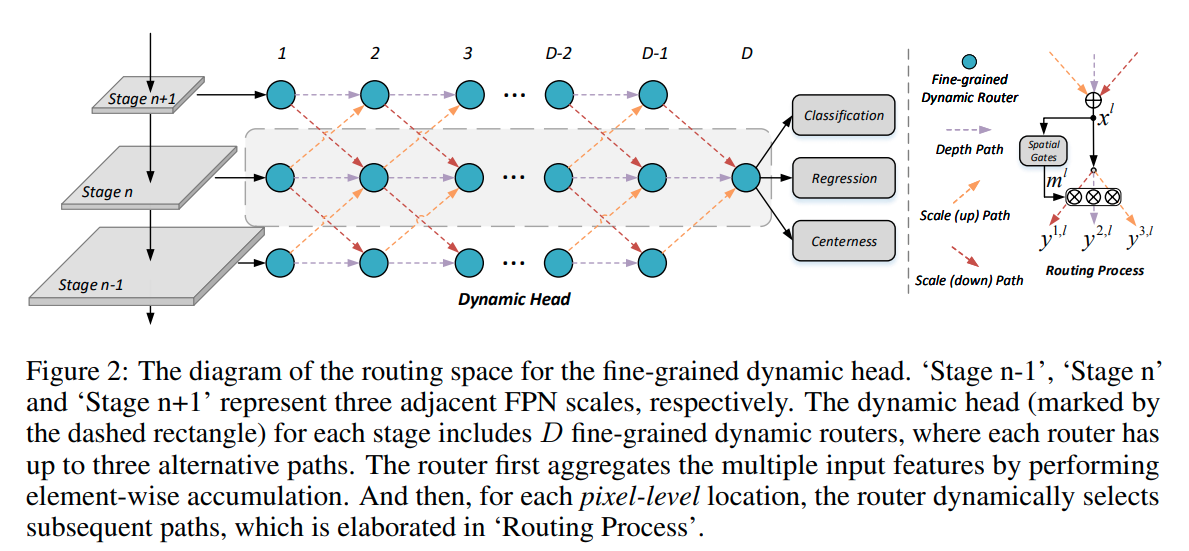 结构上就是多层地给使得相邻scale之间feature能够互通,作者额外添加了 一个routing模块;设计了一下各个path;添加一个gate.
结构上就是多层地给使得相邻scale之间feature能够互通,作者额外添加了 一个routing模块;设计了一下各个path;添加一个gate.
图中gate factor 在理想情况下应该使用离散值,且理论上可以用policy gradient的方法优化[0, 1]设置,但是这里按照深度学习的传统将离散值连续化,