Aggressive Driving with Model Predictive Path Integral Control
本篇论文将Path integral Control使用在自动驾驶之中,Path integral Control属于随机最优控制的算法,概念大概是这样的,使用随机控制值进行探索与预测,然后与其选择其中最优的,综合各个点的成本以及行动轨迹,得到一个经验上的最优控制结果。
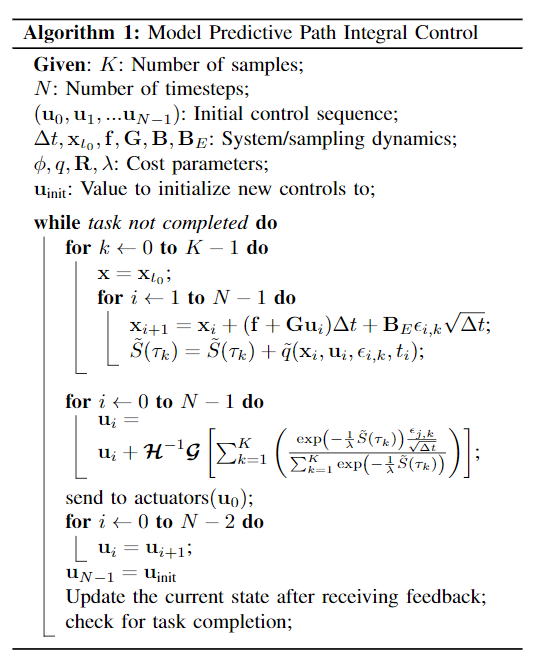
在每一个时刻:
- 确定参数,随机采样数K,预测步长N,初始化N个初始的控制序列。
- 对每一个采样点(并行进行),加入随机扰动序列并往前预测N步,得到分别的总cost
- 这里注意图中的是一个更新控制参数
- 使用模型预测控制的思路,只执行第一个控制结果
实现细节: 1. 每一个采样点的预测更新以及求和可以用GPU并行完成(用上千个随机采样样本) 2. 在实时执行的时候,每个时刻只需要随机优化整个序列一步,序列后面地方可以使用前一个时间步时的优化结果。 3. 本文控制的时候还是对控制结果进行了平滑。
理论细节: 1. 要实现上文图中的算法这一化简,要求的是随机噪声的作用矩阵的不可控制与可控制部分,不可以有相关项 2. ,就是系统动态方程中的可控部分, 是布朗漂移对应的可控部分,在我们优化的时候往往两个矩阵是相同的(假设控制结果以及成本上是仿射的),那么这个为常态 3. 是温度,会控制允许波动的自由能的大小,直觉结果是当越小的时候,结果更趋向直接取最优,当越大的时候,结果更趋向于随机选择。