PVNet: Pixel-wise Voting Network for 6DoF Pose Estimation
这篇文章解决的也是在基本已知物体scale甚至更多信息的情况下,从单一RGB图片中还原物体的位置与姿态的任务。
Motivation
如前文的做法,在做keypoint回归时作者发现了两个问题.
第一,遮挡甚至物体超出图片范围的情况。直接回归精度有限而使用heatmap(比如PAF)会面临的问题则是完全无处理物体超出图片范围的情况。
第二, 直接使用PnP求解姿态的问题在于没有考虑不同keypoint有不同的不确定性,如何求得这个不确定性(本文提供了更有趣的思路)也是一大问题。
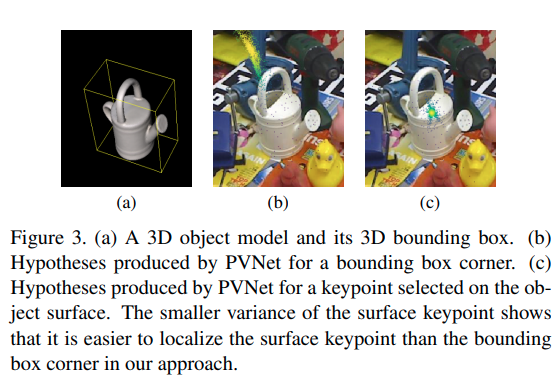
第三,前文设定其PnP问题的控制点为长方体的8个角点以及中心点,然而作者发现由于角点容易偏离物体表面,因而网络根据图片像素特征进行的回归结果效果一般,作者指出应当尽可能让控制点在物体表面
结构
总体pipeline 如图:
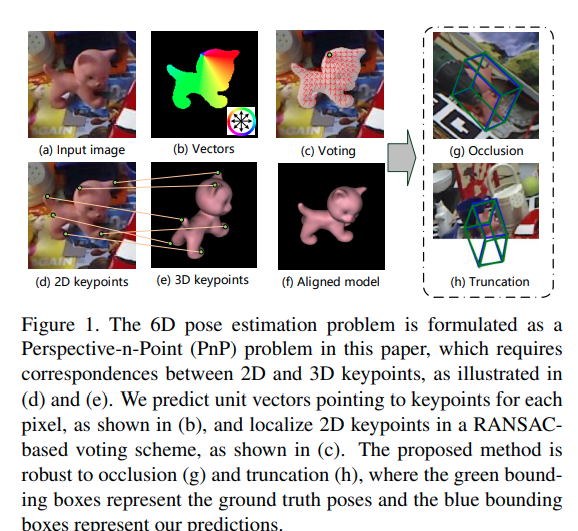
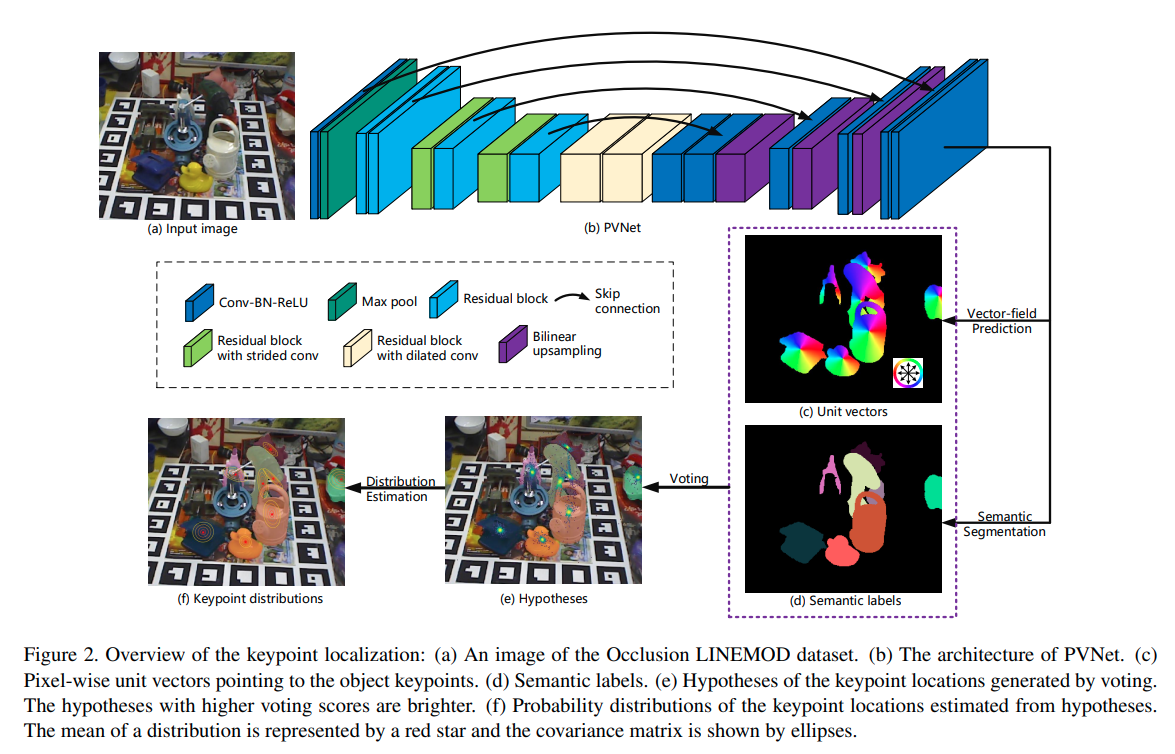
输入图片,神经网络输出语义分割结果,以及keypoints矢量场。然后使用voting确定各个物体的keypoints的期望值与方差,最后使用PnP求解物体的位姿
Keypoints as Intersections
网络在keypoints矢量场这里需要输出的是这个点到对应物体各个keypoints的单位方向矢量。则对应keypoints由本object所有像素的方向矢量决定。本文使用基于ransac的voting方式决定keypoints的最终概率分布。
算法: 1. 使用语义分割label过滤目标像素 2. 随机选择两个矢量,求出它们的角点,重复次,得到个hypothesis 3. 所有像素对这个prior进行投票,每个hypothesis的权重为其中为点乘结果的threshold,这里设定为0.99 4. 求得这个keypoint的均值与方差
Groud Truth Keypoints Selection
作者这里选择了更全面的建模效果,是一个基于FPS(farthest point sampling)的算法,使得点尽可能在物体表面,同时隔得足够远,但是需要物体的完整建模,这里暂且略过。
Uncertainty-driven PnP
由于前面得到的Keypoints带有不确定性的估计,这里在计算的时候就可以带上不确定性进行PnP优化,也就是求解一个非线性优化:
在本文的开源库中,作者使用CUDA加速了 Ransac voting,用opencv的solvePnP得到位姿的初始解,然后使用Ceres库考虑不确定性迭代得到最后结果。