DSGN: Deep Stereo Geometry Network for 3D Object Detection
这篇论文不同于此前的使用Pseudo-lidar的方式,采用了类似于plane-sweeping 的思路。将双目图像转换为三维坐标下的信息。
在总体上来说计算确实很暴力,inference也很慢,但是它的结构能让它同时进行双目深度估计,也可以读取点云作为辅助的监督信息,并经过测试能提升模型性能。
Update: 20200409: 作者已经开源,里面有CostVolume的cuda实现,值得关注学习
Pipeline
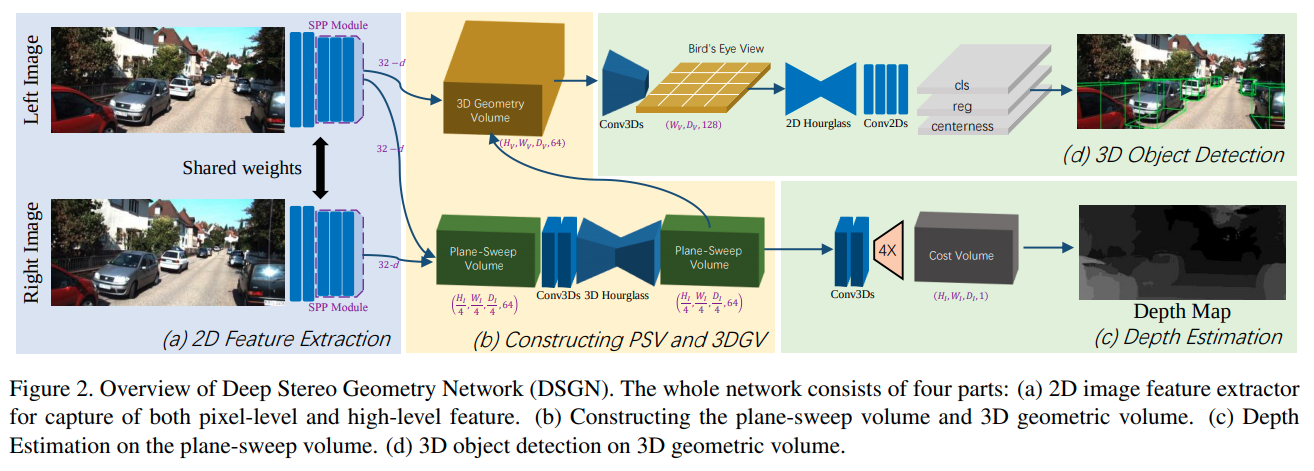
以双目为例子,如图,两帧图像同时进行特征提取,
Plane Sweep Volumn
PSV模块里面每一个index 是在所谓的图片坐标中表达的,所以这里的做法是,对每一个平面,将右目的特征在这个平面内找到与左目对应的坐标,将特征concat起来。然后用3D卷积的hourglass模型进行处理.
3D Geometry Volumn
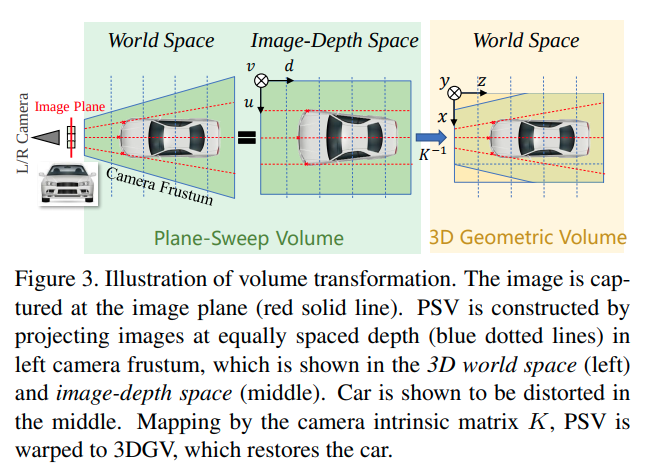
下一步要做的就是将建立在image-depth space的PSV特征投影到世界坐标中,这里的做法是,对于每一个world space点,找到它在 image-depth space中的位置,使用三向插值得到其值。(differential warping)
检测分支
之后使用3D 卷积与2D hourglass,类似OFT或者MV3D的模式压缩处理BEV图片,物体检测的模式是按照FCOS的算法进行的,这是一种anchor-less的算法。
深度估计分支,经过几个Conv3D以及上采样处理,得到的矩阵。对维度取softmin并加权求和,得到对深度的估计。
后面的实验中,作者的implementation是同时用点云与物体在两个分支上同时进行监督,得到的性能是最好的。另外本文里面所有的模型都没有pretrain,都是train from scratch。