3D Gaussian Splatting for Real-Time Radiance Field Rendering
这篇论文是近期比较重要的三维重建文章。后续有大量的工作会基于它进行开发。这里会整理它的原理以及相关的重要知识。
Modeling the Environment as set of 3D Gaussian
对场景的建模,本文在review相关工作的时候提到,曾经有Mesh/面元 这些都是常见的地图描述元素。NERF是把场景建模成了一个连续函数,而这个连续函数用训练出来的神经网络的权重来表达。与此不同的,突出利用场景离散性以节省资源的方案,有基于 面元(点+法向+椭圆平面大小)或者点的方案。
Supplementary: An Example of point based neural rendering
这篇paper NPDG的motivation就是要解决点云投影实现novel view synthesis的时候点的遮挡与空洞问题。如果图片分辨率很高,每个像素很小,投影产生的图片就会有很多空洞;如果图片分辨率很低,每个像素很大,每个像素就会对应多个点产生大量遮挡,这篇paper采用一个学习的方式,融合多尺度的投影结果输出最终图像。
Describing 3D Gaussian
回到这篇paper Gaussian Splatting,文章指出,如果我们采用SFM的点云作为输入,由于SFM点云相对还是比较稀疏的,如果从中提取法向作为输入或者是先验,这个结果的准确度是比较有限的,所以本文选择直接提取SFM的点的位置作为先验,并且把一个面元/单位体,建模为一个三维高斯(沿空间xyz轴分布的有偏高斯,初始化时设定为无偏高斯,方差为相邻三个点的距离的均值)。
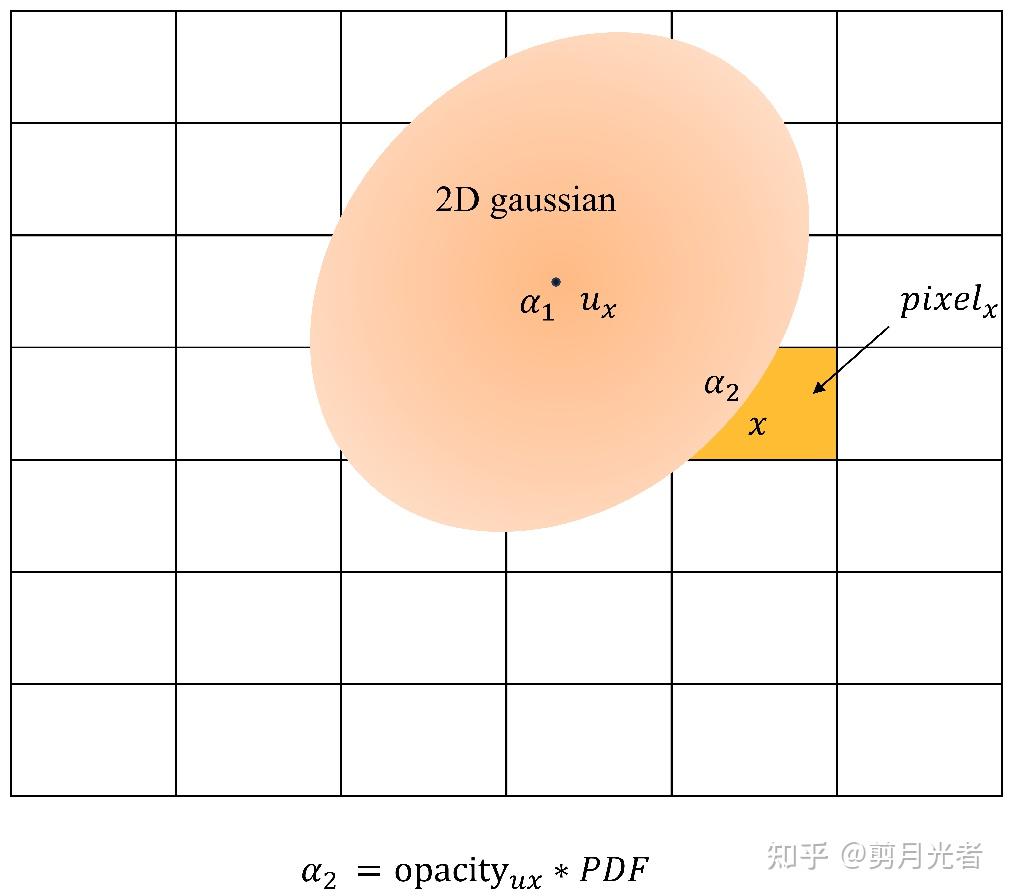
例子:把一个投影到图片域的2D高斯可视化出来如图, 其中一个像素的渲染可以计算为, 其中分别为颜色以及概率密度:
这里面牵涉到数个技术细节:
- 相机投影是一个非线性变换,三维中的高斯分布投影到相机坐标系中并不是一个高斯分布。本文在这里与前人相近,采用EKF的方式进行高斯投影的近似 其中是世界坐标到相机坐标的转换,是相机投影的雅克比矩阵。以此实现高斯块的可导投影.
- 高斯块的颜色,如果我们假设每个3D高斯是一个固定的颜色,那么渲染效果可能会非常糟糕。本文这里把高斯块上面的点的颜色建模成了一个球谐函数。这个问题本质上是寻找一个单位球面(高斯就是一个椭球面,拉伸过的球面)上的点与标量(颜色)的映射函数,与实数域中的多项式分解/傅立叶分解类似,球谐函数是一组球面上的基函数,它保证了球面上函数的连续性,同时可以根据选择的系数以较低的误差率拟合低频的颜色函数,本文拟合到三阶系数,这个也是游戏渲染中应对光照常用参数选择。
- 如何训练协方差矩阵保证半正定性?本文的选择是定义非负的三维尺度矢量(从指数激活得到),以及四元数,形象上的理解,就是从一个单位圆开始,沿三轴倍率放缩拉伸,再旋转这个椭球。得到一个任意姿态的椭球。数学上其中R就是四元数计算得到的旋转矩阵。
Training Structure
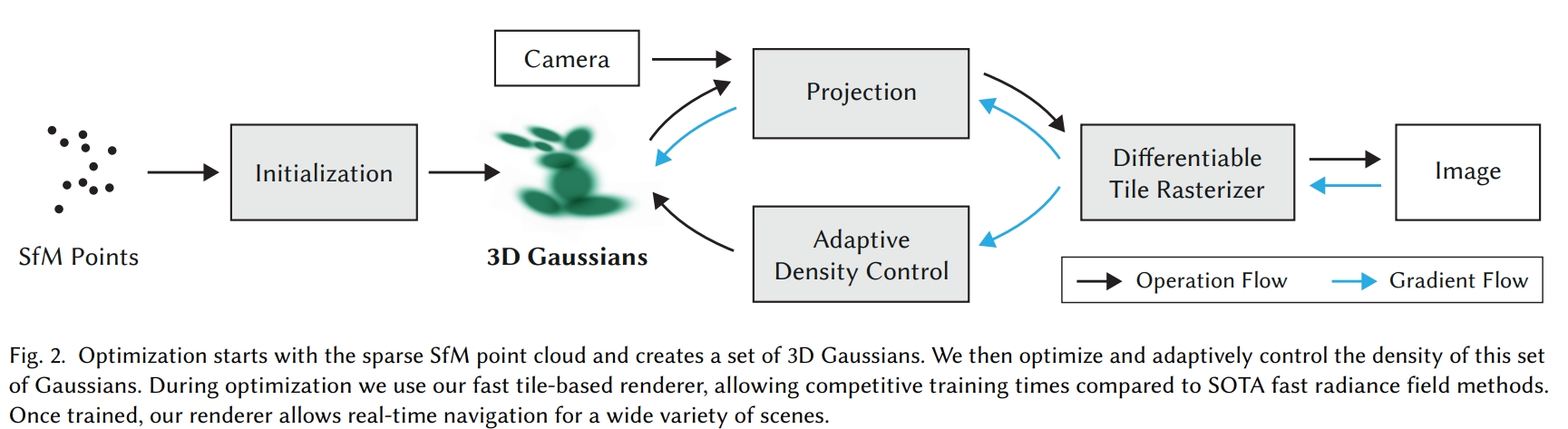
Gaussian Splatting提出的计算方案如图。初始化, 动态密度控制在后面详细展开。除此外就是3D Gaussian的可微分投影与重建损失求导。
Initialization
输入SFM得到的点云,初始3D Gaussian的点的数量以及点的位置与SFM结果相同。其颜色数据就是SFM的颜色转换到SH(Sphere Harmonic) 球谐系数,初始化为没有高阶项的常数函数。方差的初始化里,其中 r定为最近距离的三个点的均值, 旋转也就是没有旋转.
透过率opacities定为0.1 (用sigmoid后为0.1)
Adaptive Density Control
动态密度控制,这是gaussian splatting本文的一大魔法。
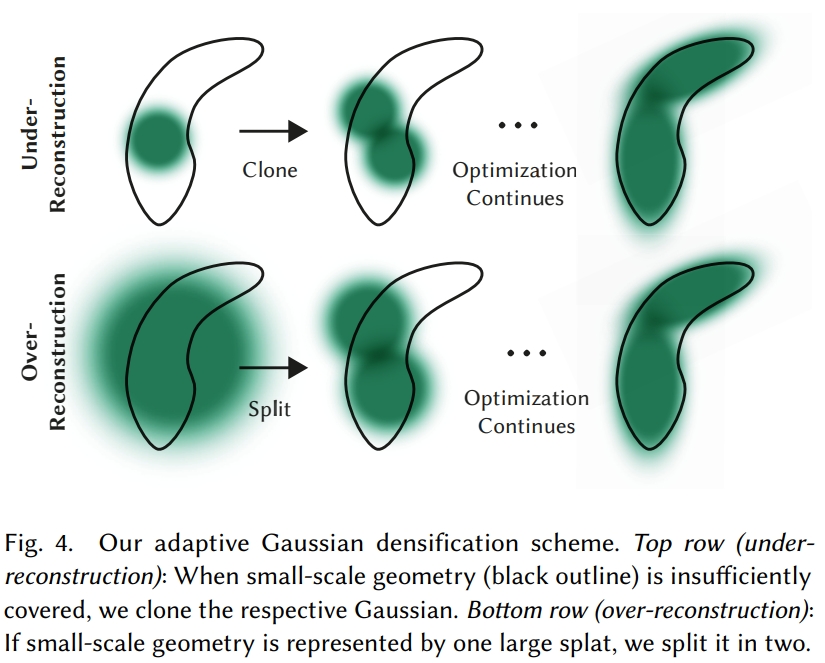
利用简单元素做场景重建时,常见的问题有以下几个:
- under-reconstruction, 对于一个实际上很大的物体,只有一个很小的gaussian去覆盖它
- over-reconstruction, 对于一个实际上很小又复杂的物体,有一个很大的gaussian去覆盖它。
- 相机前方在很近处有floating objects阻碍了训练。
对于under-reconstruction的情况,code line的操作和实际有一定区别,实际操作是进行了点的复制,而并没有偏移。
对于over-reconstruction的情况, code line正是文中的操作,在原来的大分布下面,采样两个点,取新方差缩小为为原来的 1/1.6倍。
对于第三个问题,code line, code line2,文中的操作是每隔一段iteration, 把所有的gaussians的opacity重置为0.01.
由于对第一二个问题的修正,gaussian数量会越来越多,本文会在每次densification后把opacity 小于0.005的gaussian去除。
Optimized GPU Rendering
- 将屏幕分为16*16的tiles,保留99%在视锥里的Gaussians,
- 给每个Gaussian一个key=depth+ID,然后将Gaussians进行GPU Radix Sort,得到了每个tile里根据depth排序的Gaussian列表,
- 每个tile分配thread block,每个block先load到shared memory,对于每个pixel,累积color和alpha,达到饱和时停止。