When the Sun Goes Down: Repairing Photometric Losses for All-Day Depth Estimation
这篇paper解决的是在夜间环境下的monodepth2训练问题。
首先作者总结了一下monodepth2训练需要的假设:
- 时序上光照的一致性
- 静止场景
- 没有图片噪声与遮挡
在白天环境下,主要的光源是太阳光,太阳光只会随着时间缓慢变化,但是在夜晚环境下,主要的光源是路灯、车灯等点光源,随着摄像机与这些光源的位置变化,画面整体的光照会有比较大的变化,车灯的点光源更是运动物体。且相机为了拍摄夜晚的图片,往往会有比较大的随机噪点;且随着相机曝光时间的增长,图片中动态物体的动态模糊会更加严重。
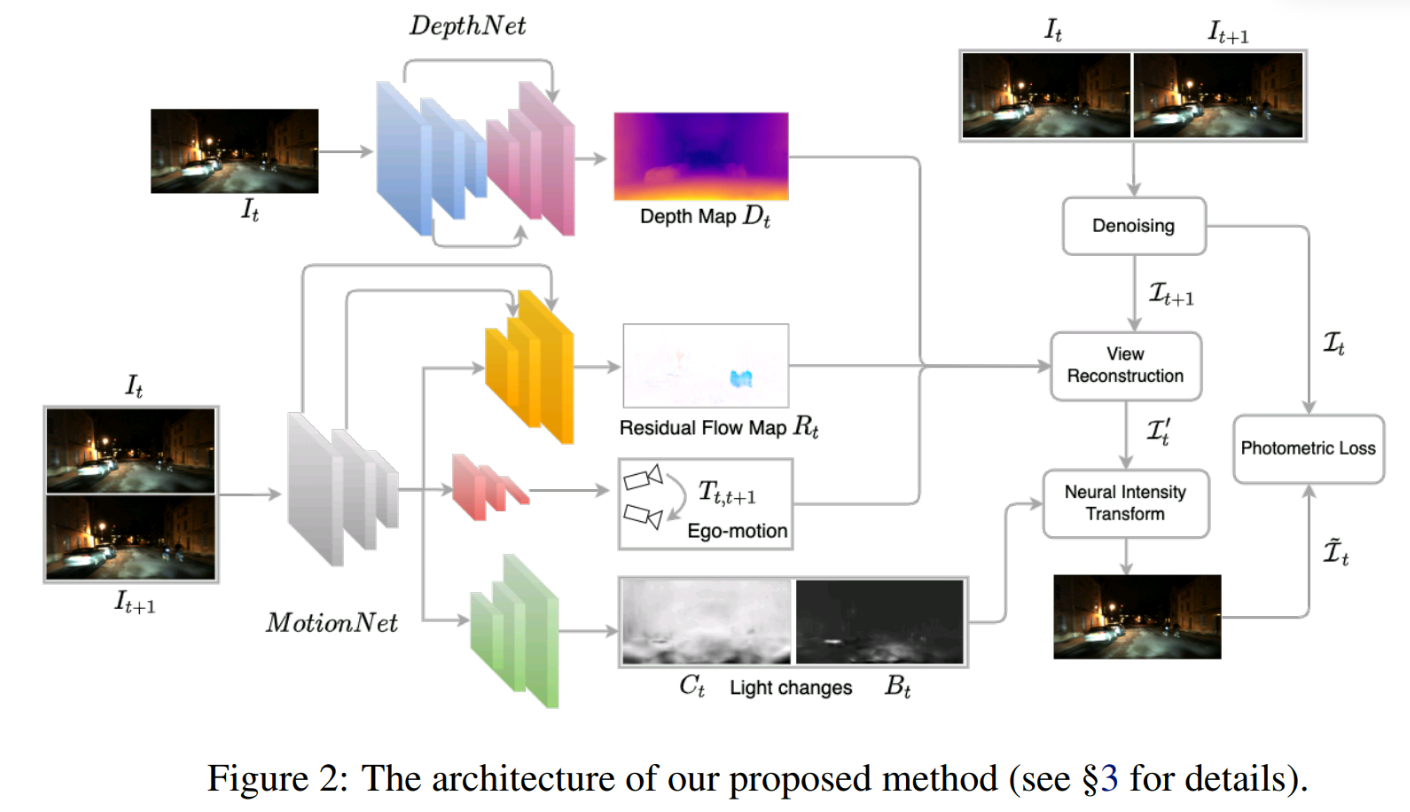
整体的计算公式
与monodepth2附加的主要内容是:
- 使用一个无监督的去噪声网络在计算损失的时候进行去噪。采用的方案是neighbour2neighbour.
- 使用网络预测一个 pixel-wise residual flow , 在重建图片的时候对重投影坐标加一个偏移。
- 使用网络预测一个 pixel-wise photometric augmentation. 如公式使用。
- 损失函数除了原有的photometric loss函数之外,还加上residual flow的sparcity regularization.