Bird's-Eye-View Panoptic Segmentation Using Monocular Frontal View Images
这篇论文实现的是端到端的前向摄像头图像到BEV全景分割。作者在KITTI-360和nuscenes两个数据集上设计了完整的label数据集。
主要网络结构如下图:
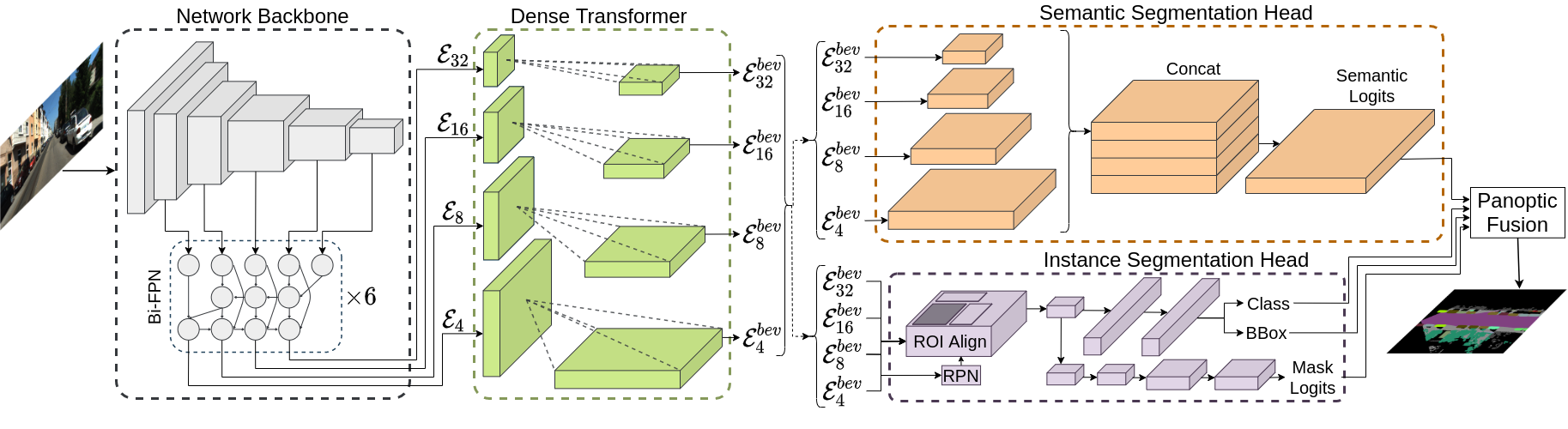
- 使用efficientDet作为 backbone & neck.
- 设计了Dense Transformer转移Front View -> BEV
- 使用anchor based 基础的panoptic seg
视角转换这个核心问题上,作者提供了两种转换方法,让网络选择(softmax)一种使用。
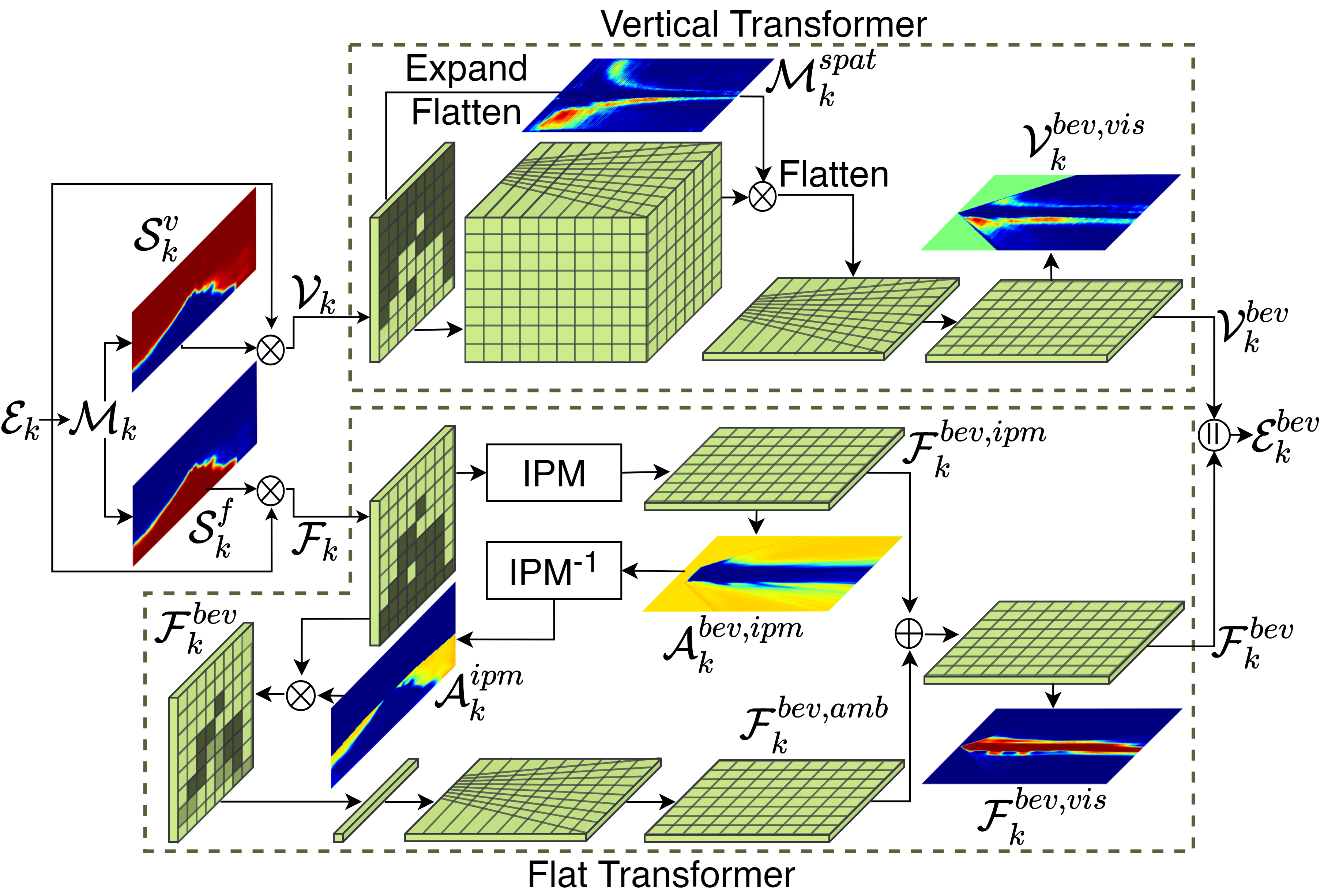
第一种也就是 vertical transformer, 对每一个像素点预测其深度(multi bin classification),使用相机内参将特征扩展成相机坐标系下的特征图,并使用3D grid_sample转到BEV上.
第二种则是IPM, 假设每一个像素都在地面上,利用相机的内参以及外参(离地面高度以及几何旋转),计算图片坐标以及BEV坐标之间的Homography Matrix, 把图片坐标直接转到BEV上.