The Temporal Opportunist: Self-Supervised Multi-Frame Monocular Depth (ManyDepth)
这篇paper将像素级的帧间匹配引入了深度预测中,使得时序单目深度预测有了更加科学的方向。同时本文提供了代码以及相关附带的Tricks,使得这一切变得真的可行.
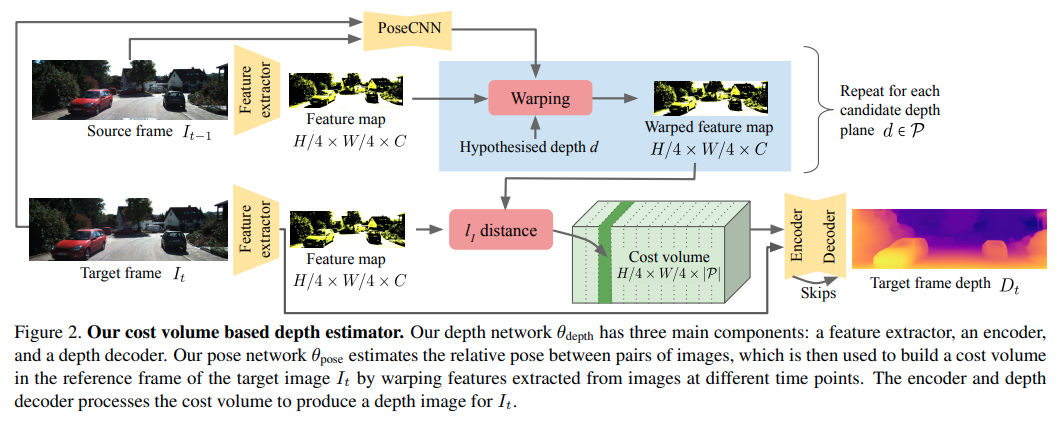
网络结构
自监督训练:
将相邻帧的图片根据posenet的结果重投影到主图片上,然后计算重投影的误差,重投影误差由 SSIM与L1 组成,这个和 MonoDepth一致。
Cost Volume Bulding:
通过给定一系列的深度平面, 将相邻帧的feature map投影到主feature map上,计算他们的L1距离,与双目匹配的类似,不过这里要考虑更复杂的坐标转换,且用深度而不是disparity作为转换标准。
同时由于无监督的深度预测网络无论如何学习到的深度和pose都只是'up to a scale'. 也就是深度平面的, 很难确认,本文让这个超参变成一个可以学习的参数。带上一个比较强的momentum.
Cost volume overfitting:
作者指出,如果直接用 cost volume, 单目的结果会有很多artifacts, 包括运动物体上会有很大的holes.
其实,从直觉上来说,一个高标准的monodepth2 baseline,加上额外的 cost volume的加持,性能应当提升了才对。但是cost volume一般只在静态、有texture的区域有效,当物体运动、无texture的时候,cost volume的信息反而会不准确。如果网络变得过度依赖像素匹配,这些问题就会很严重。我们需要教会网络避开这些难点。
本文用一个单独的单目深度估计网络,他会单独产生. 然后对Cost volume每一个像素计算 , 得到. 那么应该和接近,才认为这是值得信赖的区域。
mask公式 (如果差一倍则认为不可靠)
Static Camera and Start of sequences
如果相机不动,或者如果是在Sequence的开始,深度应该如何计算呢? 为了克服第一个这个问题, 在训练的时候,有的概率,cost volume会用一个零矩阵替代。对这些图片,我们会鼓励网络只用单图的特征进行预测;测试第一张图的时候用零矩阵替代就可以饿了。为了客服第二个问题,在训练的时候,有的概率,我们将替换为数据增强后的, 但是仍然用做重采样并计算自监督损失。也就会促使网络不要过于依赖cost volume,并在cost volume是来自静态图的时候也能有可靠的深度估计.