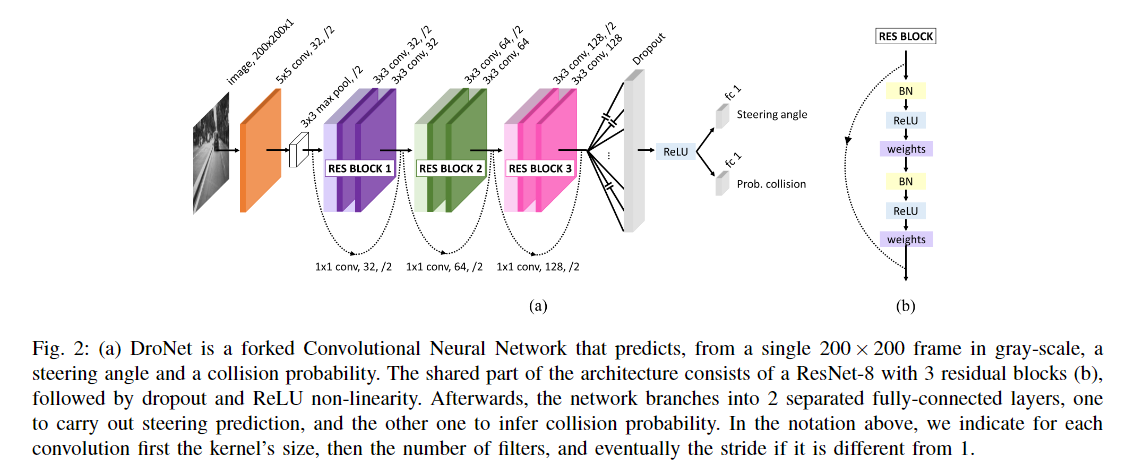
核心是一个模仿学习,输出舵角以及碰撞概率,碰撞概率来自于作者额外手工标注的数据集。
突出的结果是用无人车收集的数据能够扩展到无人机使用。
From here you can search these documents. Enter your search terms below.
 核心是一个模仿学习,输出舵角以及碰撞概率,碰撞概率来自于作者额外手工标注的数据集。
核心是一个模仿学习,输出舵角以及碰撞概率,碰撞概率来自于作者额外手工标注的数据集。