Variational Monocular Depth Estimation for Reliability Prediction
这篇paper以网络输出每个点的深度的概率值为独立的高斯分布为基础,正面地从概率推导了单目深度的variational inference 方法.
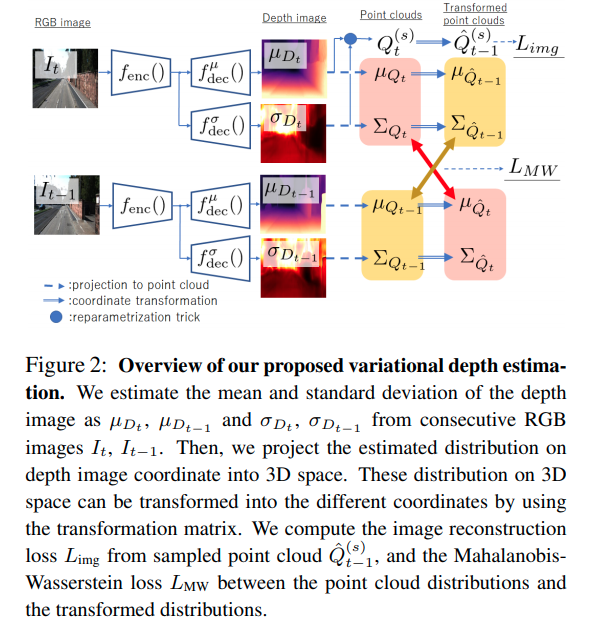
From Probabilistic to Loss function
设图片序列. 假设深度图是由点云这一隐变量决定的.
从图片中估计出点云的概率记为. 下一时刻的图片也是有相同的点云生成的
定义每一个点 variational posterior . 可以理解为时刻生成的点云在时刻坐标系下的不确定度.
其中:
为高斯分布的熵, 可以证明高斯分布的熵仅与其方差有关
定义为 其中是时刻点的0,1对应值。作者要求两帧点云的点一一对应,
网络输出结构
, 是将T时刻的点云投回T-1时刻后的匹配损失。 关于的最小化可以用一个Optimal Transport 来求解这个一一对应问题.
第三项则可以理解为重建: