MonoRUn: Monocular 3D Object Detection by Reconstruction and Uncertainty Propagation
这篇paper用一个二阶段的模块以及稠密的PnP匹配,绕过了对距离的直接预测。
做法
尽管本文在self-supervision上的用词值得商榷,但是其算法值得模仿。
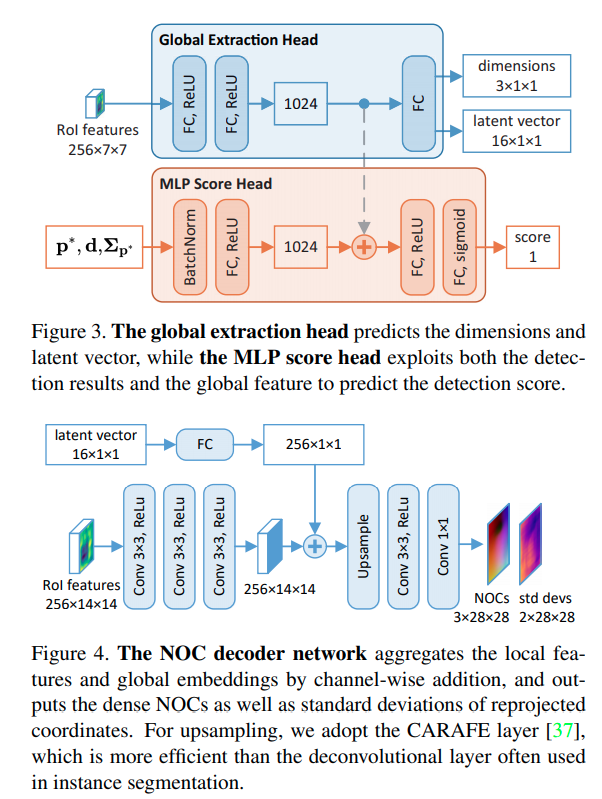
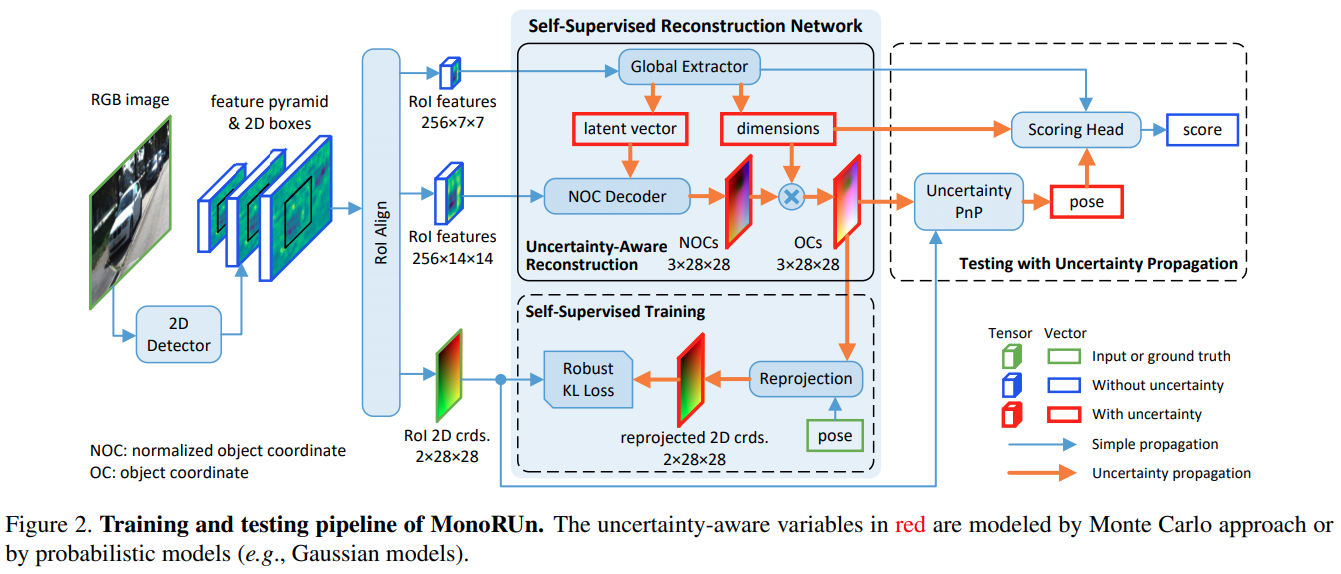
首先是使用二阶段物体检测器框出物体并提取其特征。这个特征输出 score, latent vector以及物体的dimensions. 再输出每一个像素点在车辆坐标系下的位置 normalized by dimensions。
训练的时候利用ground truth 姿态计算每一个pixel predict的三维坐标,然后反投影回来,得到误差如下
在推理的时候使用 Uncertainty aware PnP 对这个稠密PnP问题进行求解。