Machine Learning for Robot Planning and Control from Byron Boots Georgia Tech Robot Learning Lab
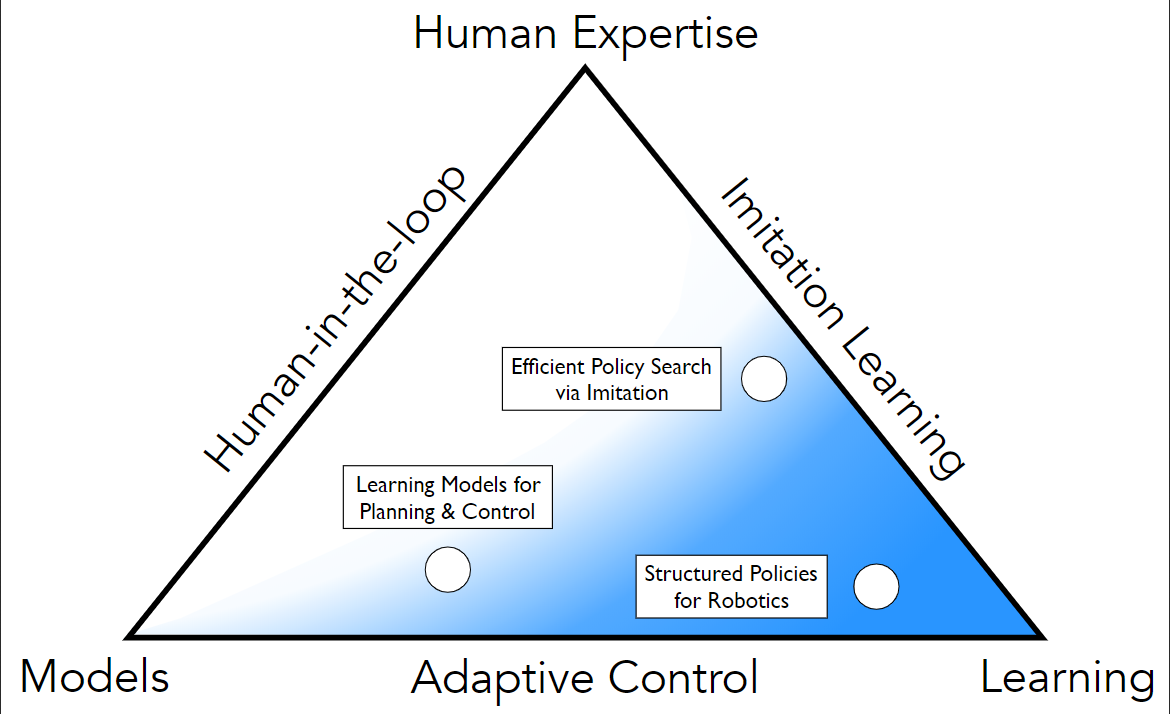
本文先讨论开车这个问题,并引出深度学习在机器人控制与规划中的利用的一个三角图。
MPC
第一部分先集中讨论MPC,MPC是一个成功的算法以及解决问题的方式,但是大家普遍认为成功的传统MPC有一些问题。总结起来,MPC问题一是非线性(动力学与约束),问题二是模型不准确。
然后介绍了MPPI算法 这里描述的另一个问题是在使用MPPI算法实时学习的时候,存在一个探索的问题,输入需要丰富,同时与实际的输入分布相似。
要缓解这个问题,演讲者使用的其中一个方法是先用human driver得到初始数据,对模型进行初始训练(bootstrapping)。
Imitation
接着我们讨论模仿学习以及在专家引导下的探索问题。
这里指向了 AggreVaTeD (Aggregate Values to Imitate) [Sun, Venkatraman, Gordon, Boots, Bagnell; ICML 2017]。 暂未收录此论文
Parameterized a Robot
这里指向了differentiable MPC(这篇论文又很重要地参考了OptNet),