Backprop KF: Learning Discriminative DeterministicState Estimators
这是一篇比较早期的论文,介绍的是可微分卡尔曼滤波。
核心结构
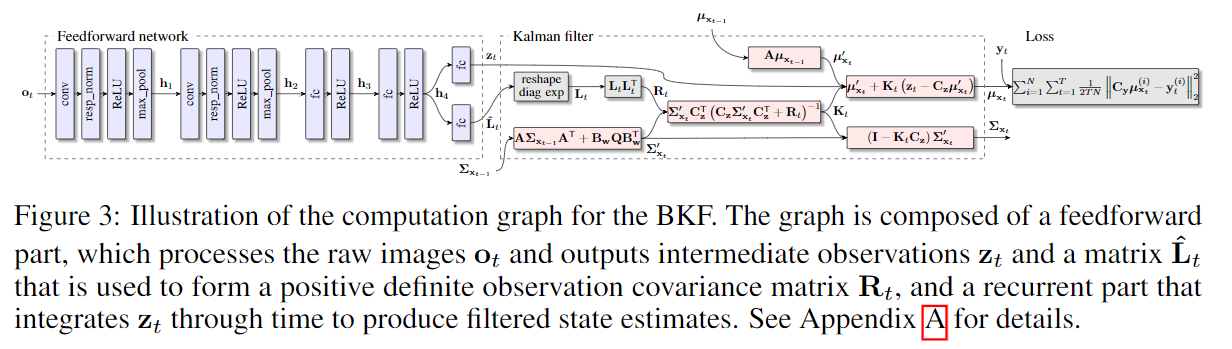
用CNN输出一维的观测矢量,以及观测的covariance矩阵。
观测的covariance矩阵的生成方式:
Relu->diag->square
其余中间公式与卡尔曼滤波一致,模型动态方程与观测方程皆(状态空间ABCD,Q矩阵)皆为可学习的参数
这是一篇比较早期的论文,介绍的是可微分卡尔曼滤波。
用CNN输出一维的观测矢量,以及观测的covariance矩阵。
观测的covariance矩阵的生成方式:
Relu->diag->square
其余中间公式与卡尔曼滤波一致,模型动态方程与观测方程皆(状态空间ABCD,Q矩阵)皆为可学习的参数
From here you can search these documents. Enter your search terms below.
| Keys | Action |
|---|---|
| ? | Open this help |
| n | Next page |
| p | Previous page |
| s | Search |