End-to-end Learning of Multi-sensor 3D Tracking by Detection
这篇论文主要讨论的是一个tracking问题,突出贡献是使用了离散优化的概念(在求解时转换为了线性优化问题),并解决了如何训练这个问题,过程中有较多的数学巧合,但是其实这是一类问题的解决方法,这个问题称为general matching problem,可以参考引文6的问题阐述以及附录1。
推断结构
![]()
逐个分析:
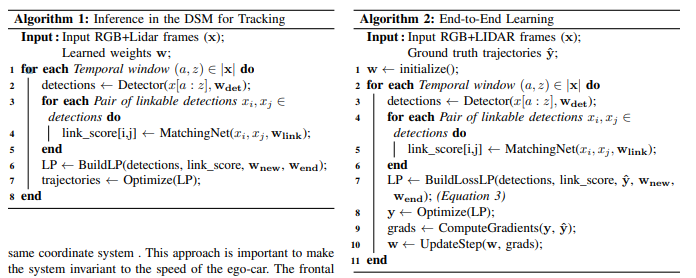
- Detection Net用的是MV3D
- Scoring Net,将每一个3D框投影回图片中,用VGG总结,给出这个图片是true positive的cost
- Matching Net,分两支,一个是Siamese Network,将两个3D框对应的图片送到network中提取共同信息,第二个是运动矫正后的3D投影图,送到network中提取信息。然后最后由FC Net得到预测。这个network需要对每一对可能的匹配计算。
- new cost and end cost:对一个detection是新的或是最终出现的预测,是一个常量,可学习。
过程简介
两个Linear、Integer Programming的定义
约束矩阵
简单地说就是新生的or从上一帧来的object = 结束的or去往下一帧的object = 这一帧这个object是否是true positive
在纯粹inference的时候,优化目标就是,每一个布尔决策y前的cost由前文的Matching Net, scoring net,以及可学习常量给出。直接用OR-tools求解,相当于已知reward参数找出最好的解
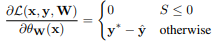
在需要train的时候,优化目标就是 里面的 作为inference时候需要求解的LP函数。思路类似于SVM中的对偶优化问题,在训练的时候,我们需要找到,使得,worst case的一个"错判loss"最小,而这个worst case的错判loss,首先要定义错判loss,其次是用max找出worst case(简单).而错判loss这里用汉明距离+reward difference,理想情况下,汉明距离越大,reward difference就应该越小,反之亦然,并最好保持为一个常数
对于错判loss,首先汉明距离小时reward difference自然也会小,而汉明距离大时reward difference也应该为一个大的负数以抵消,如果出现汉明距离大而reward difference不够小,则这个worst case需要被修正,也就是这个玩意儿的intuition。
关于其梯度,建议参考这篇。得到的结果是
关键是根据引文6,这个约束矩阵A是一个单模矩阵,所以其逆矩阵的解都是整数,所以Integer programming被转换为Linear Programming并同时保证了最优解一定是整数。