Frustum PointNets for 3D Object Detection from RGB-D Data
这篇论文给出了使用RGB-D数据进行3D检测的baseline pipeline.
网络结构
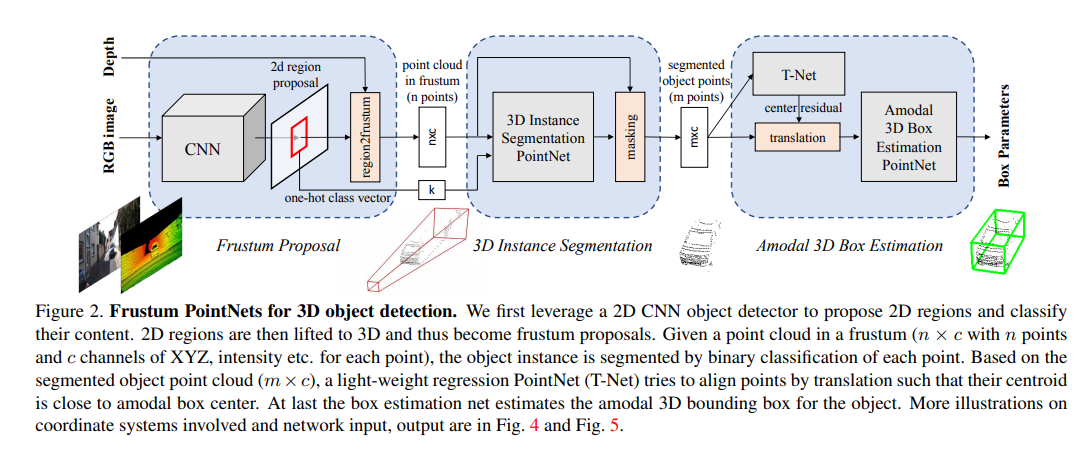
对RGB图片执行2D detection,给出2D proposal以及分类one-hot矢量,从proposal中采样出n个点,使用pointnet进行Instance Segmentation区分背景以及foreground,执行masking再采样m个点,使用T-Net等回归估计三维框结果
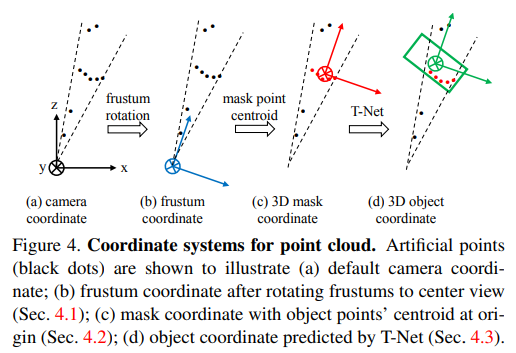
代码中使用的坐标系示意图
PointNet使用的结构
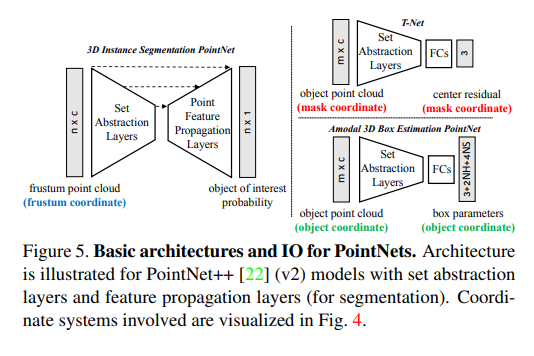
点云语义分割中,除了使用pointnet之外,在输入特征中还concat了语义分类的category。 在点云回归时,先用T-Net求出中心点坐标,将剩余点转换为以中心点为中心的位置上在估计box size
Loss
- Multitask Loss
- Corner Loss