Real-Time Seamless Single Shot 6D Object Pose Prediction
这篇论文是一篇较为基础的3D物体检测文章,进行的是在基本已知物体scale的情况下,从单一RGB图片中还原物体的位置与姿态的任务。
这篇文章有开源的代码,同时对于本文而言是这篇文章的相关前置.
总体架构
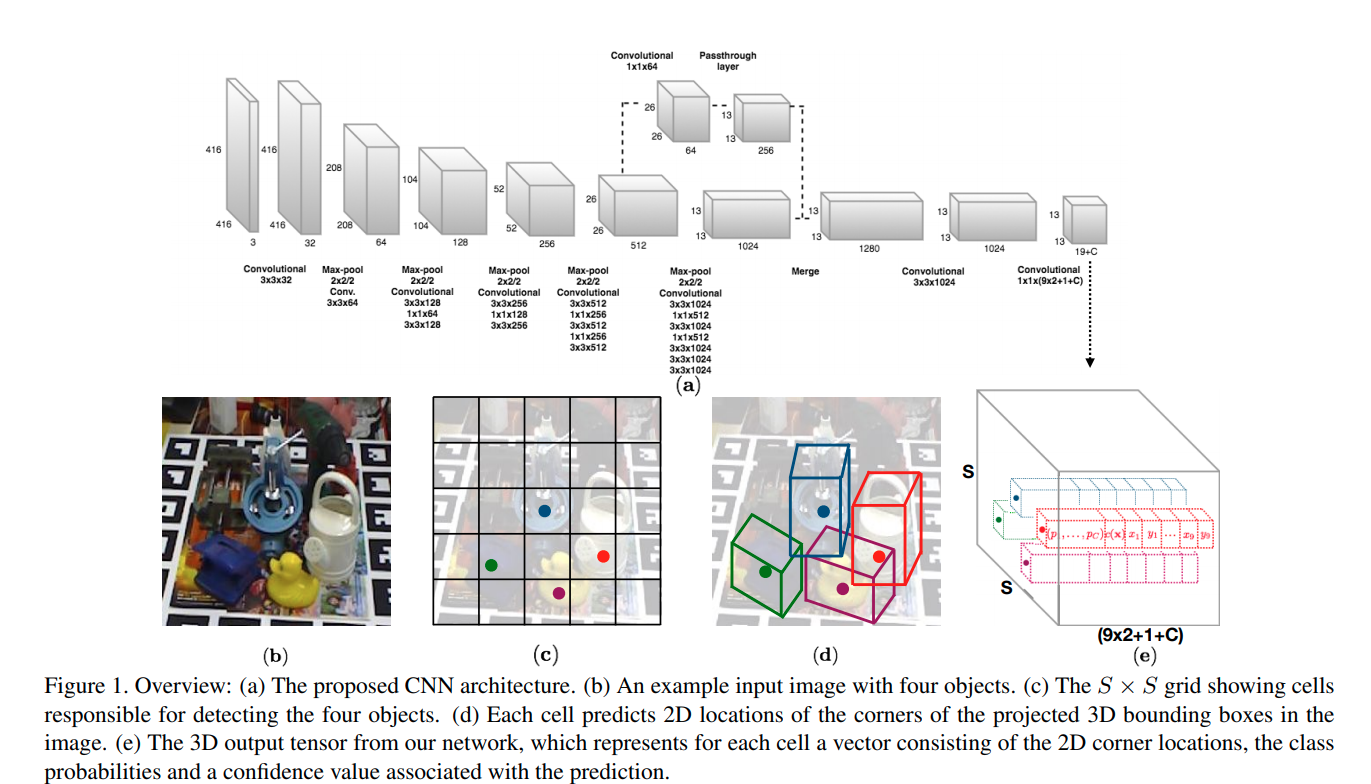
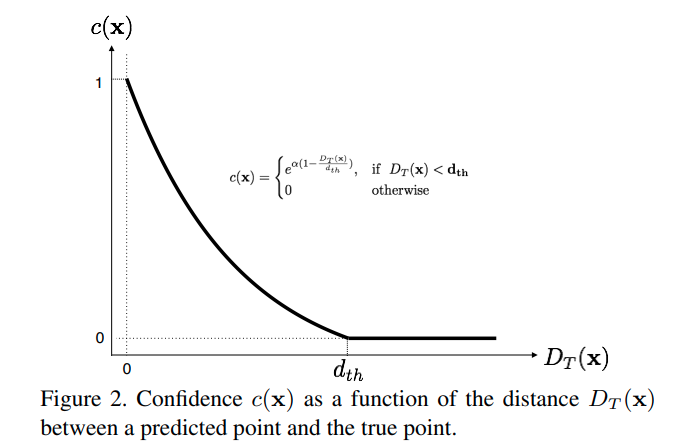
这篇文章借用YOLO的架构,输入为一张图,用dense anchor box预测各个位置上不同物体的大致位置,同时这个anchor box还会输出物体的9个控制点在图中的相当坐标,包含一个中心点以及8个长方体框的角点。另外输出个分类指标以及个objectness指标,这个指标的目标,由一个指数函数决定
已知9个点之后,使用opencv的solvePnP函数直接求得物体的相对位移与相对姿态。