From Multi-View to Hollow-3D: Hallucinated Hollow-3D R-CNN for 3D Object Detection: (H23D-RCNN)
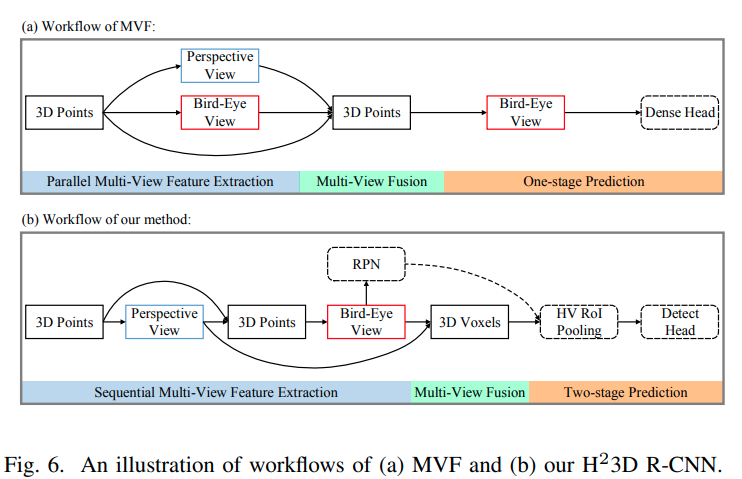
这篇paper提出了一个基于跨视角融合的two-stage点云检测算法。其主要的motivation是说点云是在物体表面的,所以用two-stage可能更好。
方法:
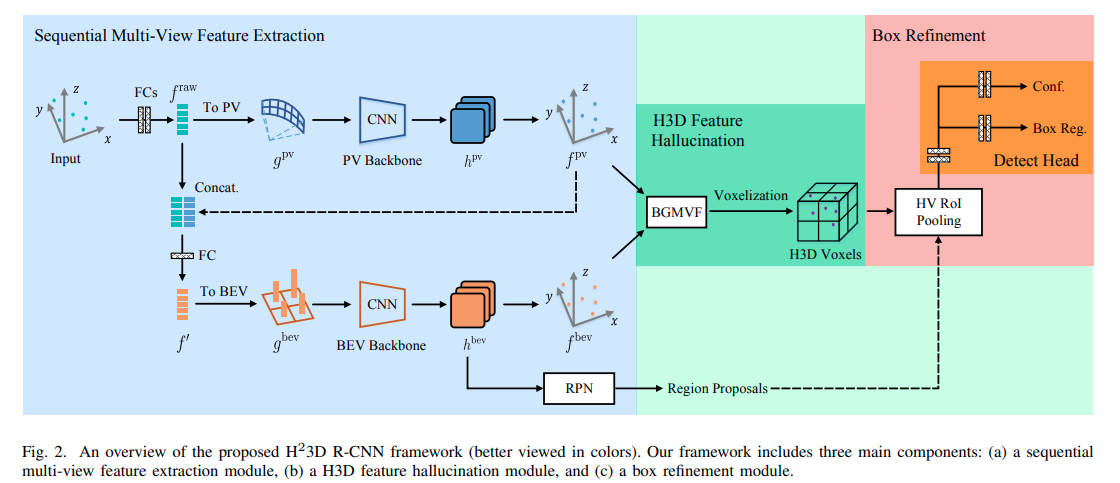
多视角特征提取:
- Multiview Grid Indexing: BEV使用笛卡尔坐标系,而Perspective View(PV)使用圆柱坐标系。
- 对每个点先用全连接提一次特征,在投射到PV/BEV时,由于voxelization,会有重叠点,这里采用的方案是max-pooling.
- PV backbone 与 BEV backbone权重共享。 但是BEV能获取PV的信息。
H3D Feature Hallucination
这个模块的输入是来自两个模态的点集特征,输出的形态上来说是 proposal generator, 也就是第一阶段的结果. 这里和PointRCNN很像,让每一个点给出一个proposal.
融合的时候,文章提出新融合模块 Bilaterally Guided Multi-View Fusion(BGMVF)
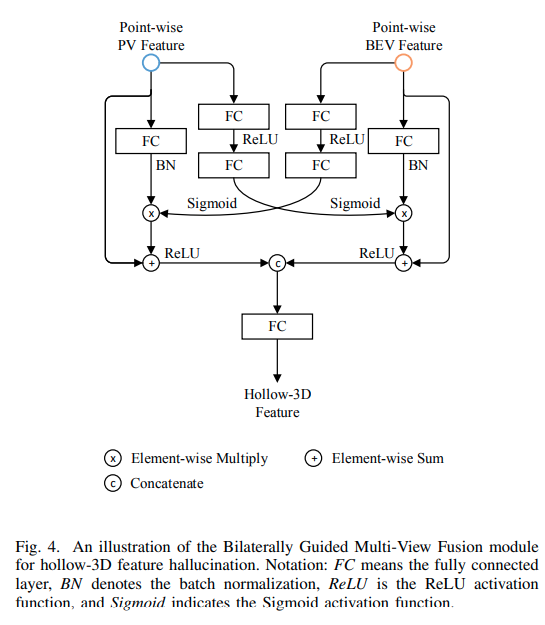
输出是point-wise H3D 特征,再次进行voxelization, 其indexing 方法是 , 其中对应BEV的位置, 对应PV的高度。再次用max-pooling进行voxelization.
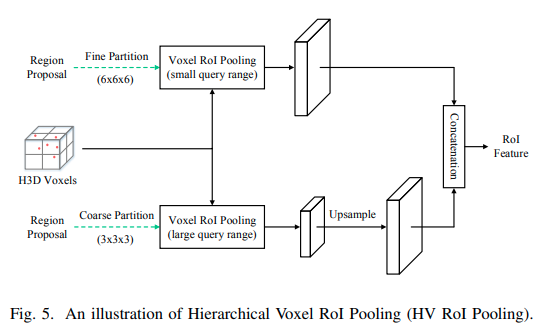
Box Refinement
这指的是方法的second stage.
方法的meta architecture 如图