Pyramid R-CNN: Towards Better Performance and Adaptability for 3D Object Detection
这篇文章主要处理的是two-stage的 基于点云的三维检测。
其核心思路如下:
- 改善了two-stage detection的特征提取模块。
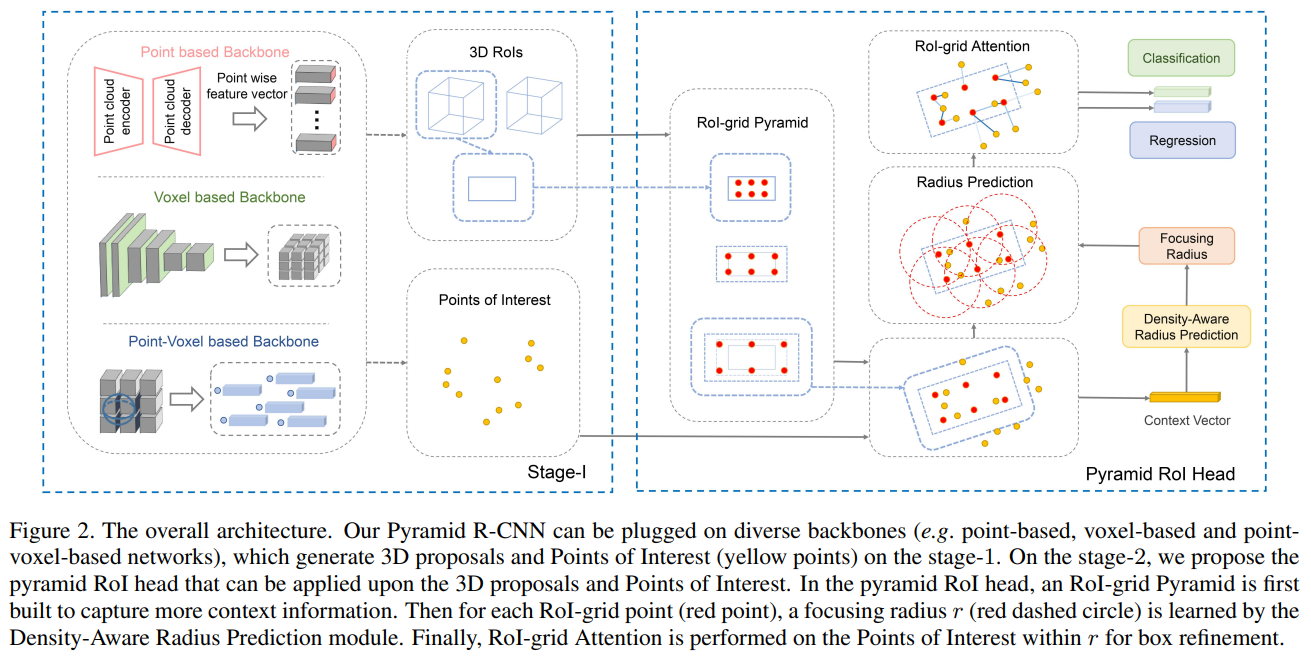
- 观察到数据集中点的稀疏性,有7%的物体中只有不超过10个点。因而考虑需要initial prediction外面的测量点的特征来辅助判断物体的实际位置和形态。
- 做法上,首先是提出了RoI-grid Pyramid, 层级式地增加可以被"RoI"包含的点的范围,从而进一步考虑了附近的点。
- 提出了高泛用度的自适应的特征提取方法 RoI-grid Attention。
- 可学习的,自适应地对临近点搜索的半径进行预测。
- 有一大优点,可以嫁接于多种one-stage网络(backbone网络),适用多种关键点表达。
RoI-grid Pyramid
本文首先解释了为什么点云需要考虑proposal之外的点,而图片不需要。 - 点云过于稀疏 - 图片Dense, 且有明确的更大的感受野。
RoI-grid Attention
已经有了一些keypoint以及RoI, 从上文的公式会得到一系列需要采样的grid点的位置, 对每一个点的附近距离内的所有点的特征进行融合,这个的计算在后面表述,融合的时候有一系列的可能的方法。
- Pooling-based Operator:
- Graph-based Operator:
- Attention-based Operator:
- RoI-grid Attention:
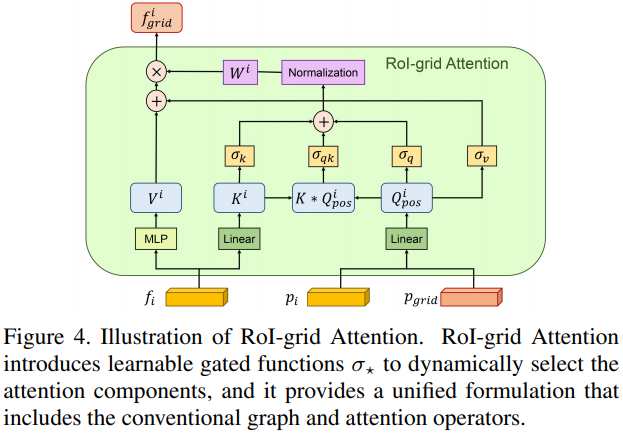 通过的不同取值,可以把本文提出的融合方法变成上面几个方法。这些参数是用全连接层输出的sigmoid函数来自适应学习的。
通过的不同取值,可以把本文提出的融合方法变成上面几个方法。这些参数是用全连接层输出的sigmoid函数来自适应学习的。