Probabilistic End-to-End Vehicle Navigation in Complex Dynamic Environments with Multimodal Sensor Fusion
这篇paper也是实验室学长的工作. 有视频:
Network structure
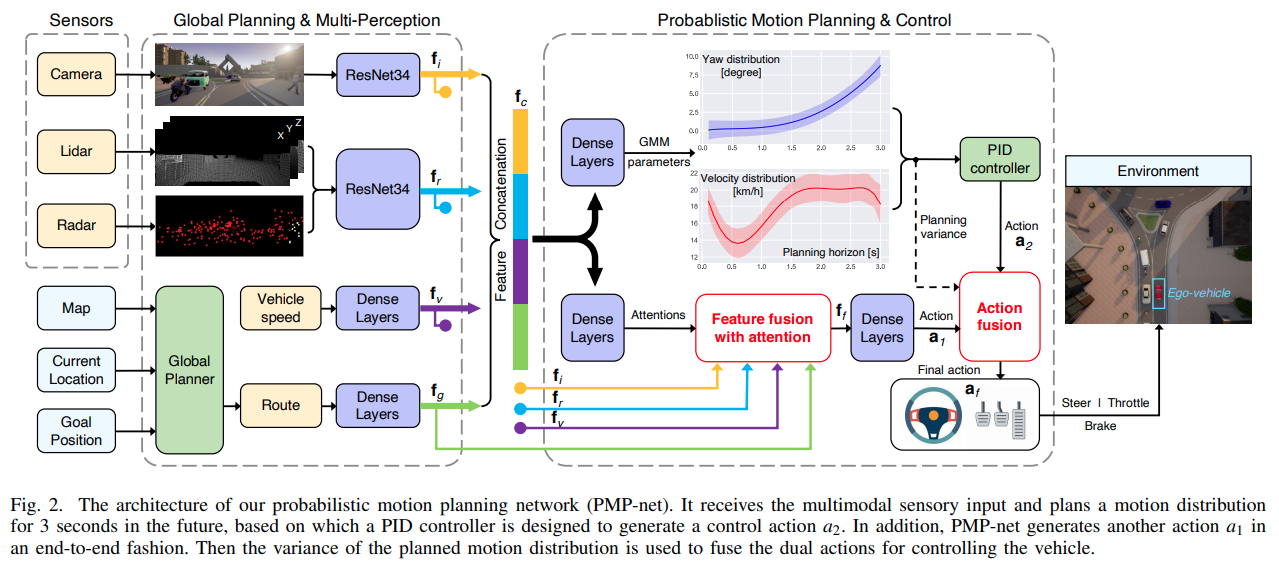
Route来自于CARLA的输入,这里采用最近的130个waypoints(CARLA地图上的小点)。
attention是用于表达不同传感器的特征的权重.表达的是模仿学习给出的throttle, steering and brake
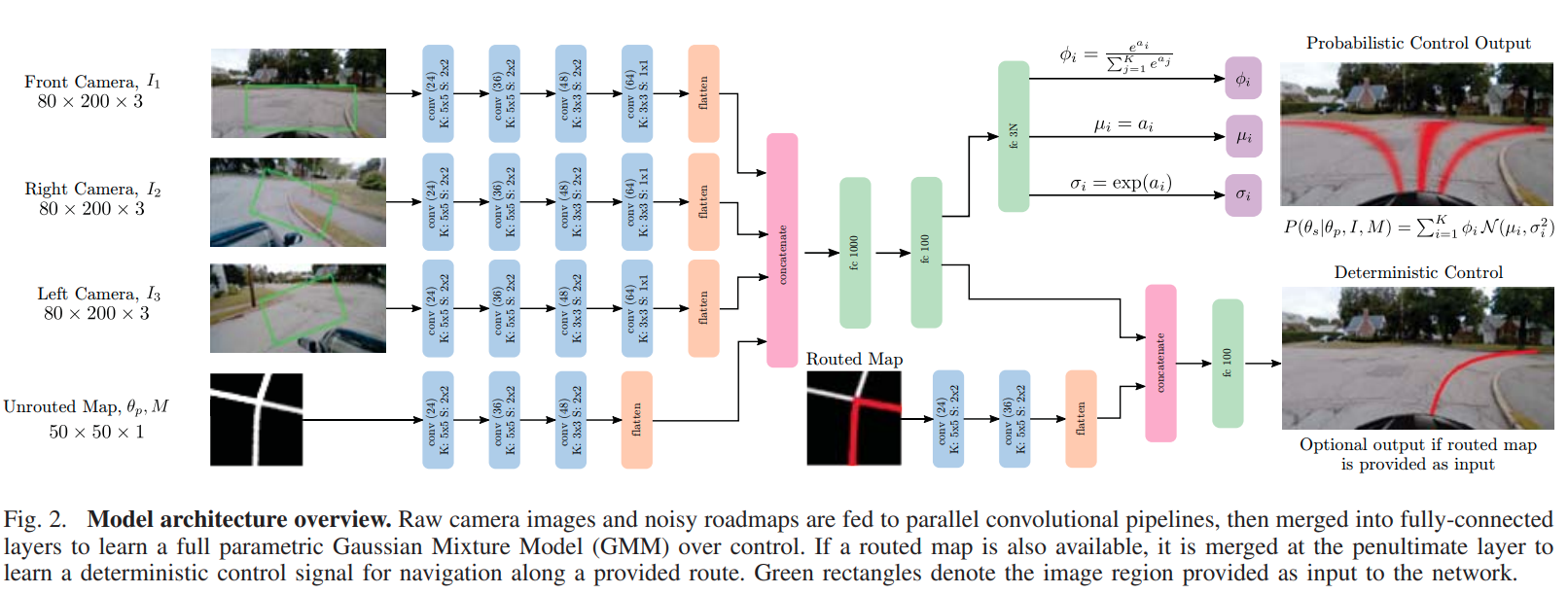
GMM的回归使用来自于这一篇paper.pdf。输出的是未来数秒内车子的运动规划值(速度与角度分布图),对其进行积分得到未来5m的目标位置,用PID控制器跟踪这个目标点得到,两个控制指令的融合则是依据对累计方差值的估计。下图来自于这篇引用的论文,具体功能与本文无关:
融合了GMM模仿学习的思想,利用GMM替代传统planning,给出带方差估计的learning结果,用模仿学习提高性能,配合方差估计给出控制结果。