Gaussian YOLOv3: An Accurate and Fast Object Detector Using Localization Uncertainty for Autonomous Driving
这篇论文引入了Gaussian Yolov3,在inference中预测定位的不确定性,减少了False Positive,以提升点数。这个论文的主要思路贡献在于,在inference的时候通过对边框的不确定性的估计修正inference时的估计。使得NMS时会真正选择对位置确定性最高的框。
Gaussian Yolov3 结构
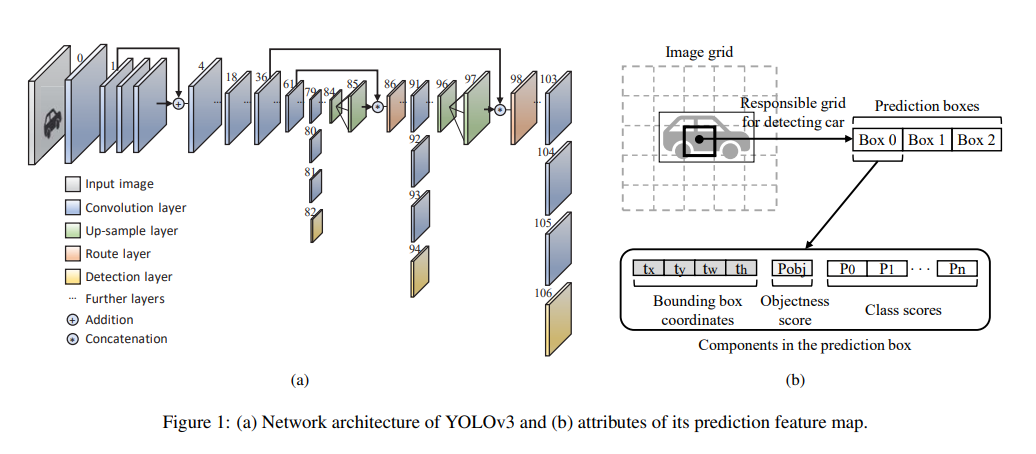
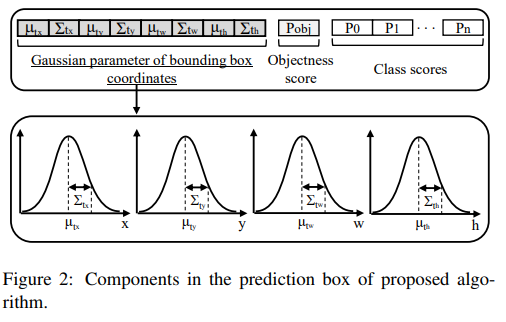
Yolov3回归输出的bbox结构包括,这样可以用高斯模型来估计。本文的算法输入如图
输出结构
损失函数
这里用negative log likelihood损失
其中W,H,为grids输出,K是anchors的数量.
inference
当输出的时候,inference时将各个index的不确定性取均值,这样会对类别的class score,会形成影响.