Efficient Uncertainty-aware Decision-making for Automated Driving Using Guided Branching
这篇paper是沈教授组Wenchao Ding 在车辆意图预测,决策以及路径规划的几个工作之一。该作者在实车上实现了性能较好的demo。
这篇paper基本没有使用学习算法,重点是基于经验的抽象与剪枝,解释性以及扩展性都很强。
设计框架
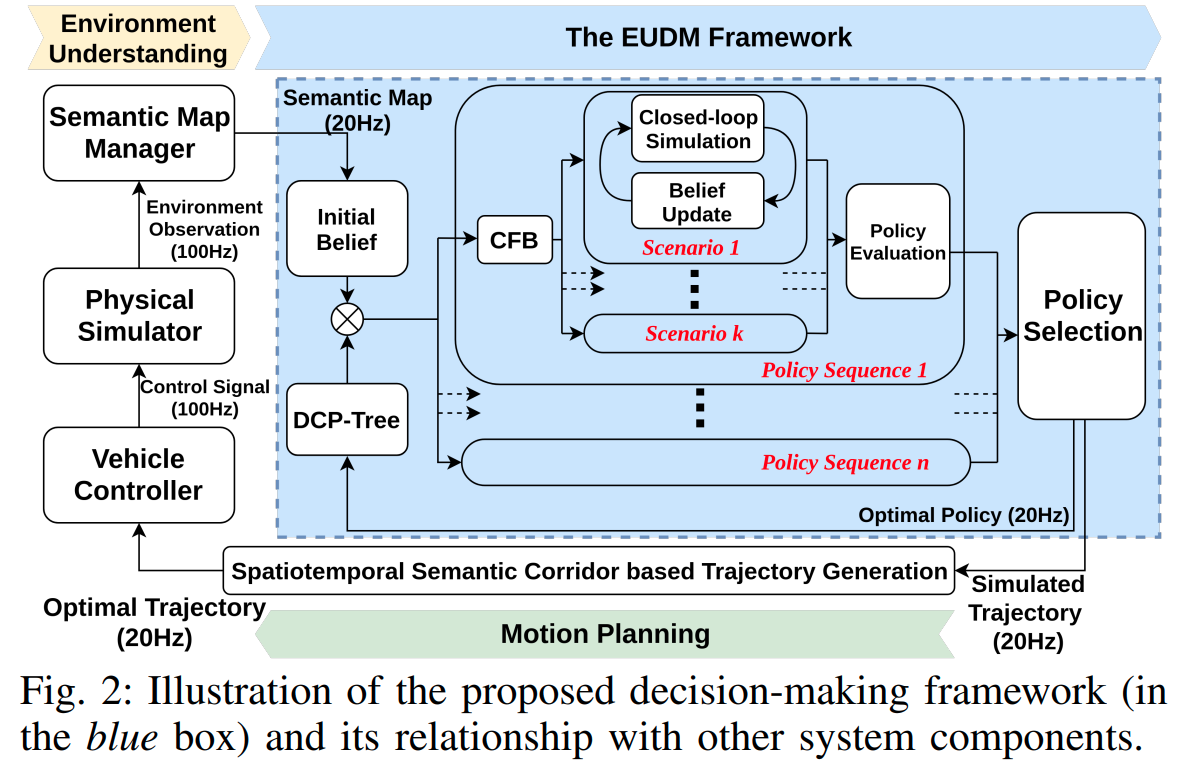
蓝色框部分主要是一个部分可观测的马尔科夫模型(POMDP), 核心单元有三,第一个表征是本体决策序列的DCP-Tree, 第二个是对重点车辆的行为进行穷举的CFB, 第三个是每个被穷举场景的仿真
Domain-specific Closed-loop Policy Tree (DCP-Tree)
作者设计了一个8s的planning horizon,每2s为一个policy更新的节点,所以DCP树的深度为4。作者进一步考虑了一个剪枝方法,作者认为每个规划周期中,只会发生一次策略更新,如果需要复杂的规则变化(lane-keep -> lane-change -> lane-keep),则可以通过高频率的重新规划实现。
Conditional Focused Branching (CFB)
作者的设计是穷举相关车辆的所有intention, 但是这个"相关"车辆是由本车的决策决定的。比如左转的时候会仅考虑本线以及左侧的车辆,限制了搜索的agent数量。
内部仿真
作者在法向方向对其他车辆的控制算法是pure pursuit controller, 沿线方向的控制逻辑为 IDM