Joint Unsupervised Learning of Optical Flow and Depth by Watching Stereo Videos
正如题目表示,本文的目标是使用连续的双目视频,同时预测光流、深度以及相机运动。大幅度重用前人的研究,特点是注重对运动以及遮挡物体的去除
主体流程图
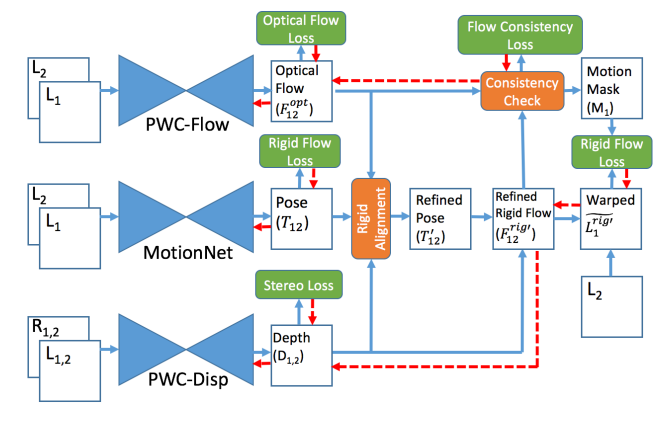 这个pipeline分为好几个stages
这个pipeline分为好几个stages
首先,用PWC-Flow预测左目相机的两张图之间的光流,用MotionNet预测左目相机两张图之间的运动 , 用PWD-Disp估计双目相机之间的视差,用视差可以转换为深度。
第二,结合,我们可以计算出因相机刚体运动而产生的光流,记为,图中未呈现。然后rigid-alignment module将相机运动从精修为,并进一步得到精修的
第三,Consistency check去除运动区域。
第一、网络结构
PWC-Disp从PWC-Flow更改,在Cost volumn计算的时候强迫它只在水平方向上搜索,输出形状自然变成了
第二、Rigid Alighment Module
这个模块目标是第一步精修
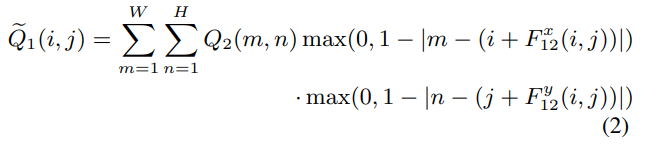
首先通过将当前图像转换为相机坐标系,3D空间中的点,然后使用转换,得到对应点在第二时刻相机坐标系中的点。则表示通过光流回到第一时刻的坐标,
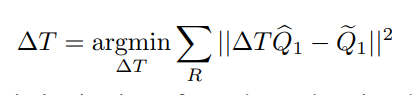
通过求解以上两个步骤,可以得到精修的T
第三、Consistent Check
精修的rigid光流与网络光流的差中,值过大或者被遮挡的部分会被过滤掉,使用thresholding给出一个mask,只有mask中认为是静止物体的才会进行loss计算。