CornerNet: Detecting Objects as Paired Keypoints
这篇文章是这篇文章的前置,实际上也确实有更多的内容,在具体实现上有区别。
这篇文章给出的思路是,让神经网络分别给出某一类别左上角与右下角的heatmap,然后通过embedding vector的相似性进行两个角落的匹配。另外为了提高性能,还给出了corner pooling以及它的GPU实现。整个网络流程基本是one-stage
结构overview
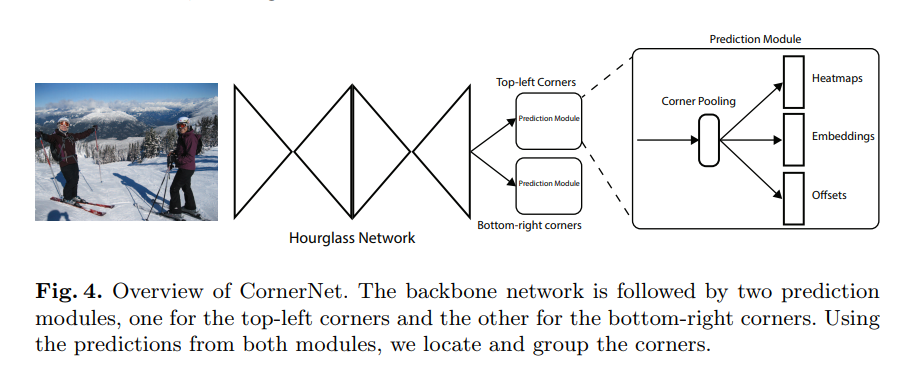
backbone网络使用的是hourglass
之后跟随的是两个预测模块,一个预测输出是左上角,另一个给出的是右下角。这两个模块有各自的corner pooling。
预测角点
网络最终输出的是两组heatmap,一个给左上角一个给右下角,每一组热图有个特征,与类别数一致(每一类一个channel的热图),feature map形状是.不像yolo或者SSD一样带有background channel。
在训练的时候,直觉与经验表示不应该简单地惩罚不正确的角点位置。这里根据物体的体积的设定不同的radius cost.
radius 虽然表达的是一个圆的概念,但是实际实现的时候是一个正方形的半边长, 其长度的设定是说一对ground truth点的正方形区域内,任选两点,两点构成的bbox与gt的bbox的IoU下限不低于某一个设定值(本文取0.3).
原版code有错误,经过一些修正后正确的实现应当是。
def compute_radius(det_size, min_overlap=0.7):
""" Compute radius from ground truth bbox.
original equation: (w - 2r) (h - 2r) / (wh) = min_overlap
Take the solution with a smaller magnitude.
"""
height, width = det_size
a2 = 4
b2 = 2 * (height + width)
c2 = (1 - min_overlap) * width * height
sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2)
r2 = (b2 - sq2) / (2 * a2)
return r2
这个idea热点图的idea以及official code(尽管不一定正确)被多个后续的文章使用, 包括 Object as point, RTM3D Unofficial Implementation
最终设计出一个focal loss,原版focal loss源自与这篇文章,在这里有简介。这里的定义是
其中为位置上的score,,其中是radius是, 是图片中物体的数目。是可调节的超参数。
由于卷积网络里面我们需要对图片下采样,,需要额外学习一个offsets去补偿 这个cost可以用
将角点聚团
因为一张图如果有多个物体,一个图会有不止一对的左上角点和右下点。本文的做法提到了这篇论文,简介
网络给每一个左上角与右下角角预测一个embedding vector,本文这里模仿前一篇论文的做法,维度仅为1。如果代表的是同一个bounding box,那么两者距离就会比较小。分为两个loss,一个是pull一个push。
作为第个物体,左上角的embedding,作为右下角的。是的均值,然后设定,与offset一样,这个loss只执行在gt的角落位置上.
Corner Pooling
用来允许每一个,计算方式如图
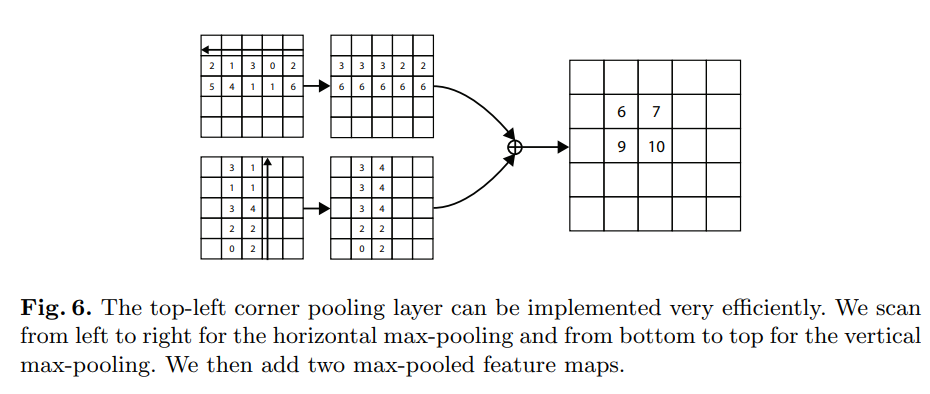
然后对相加得到结果。为右下角的pooling layer取max的方向相反。
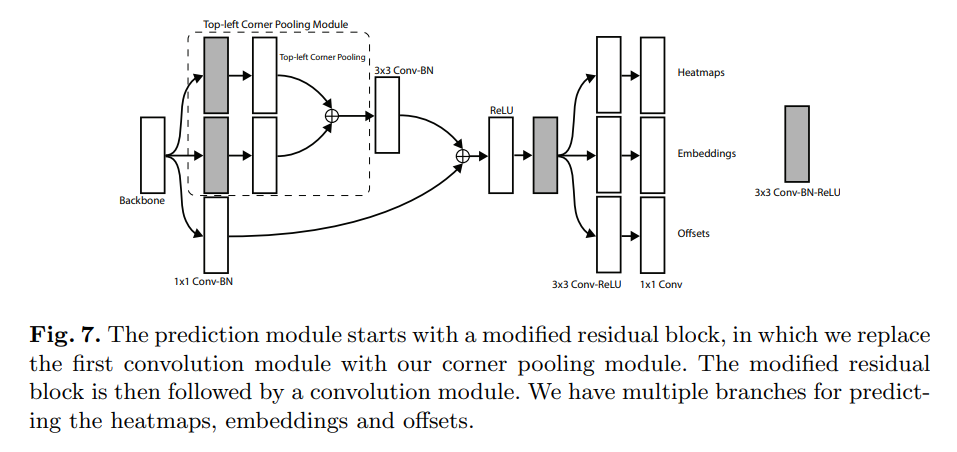
先将基础的resblock的第一个卷积改为corner pooling.