DeepPruner: Learning Efficient Stereo Matching via Differentiable PatchMatch
不同于使用Cost Volomn密集预测disparity,这篇论文使用Differentiable Patch Match进行一个粗略的disparity估计,最终使得需要densely predict的disparity值远远比之前少。所以称之为pruning。作者称实现了实时的Scencflow估计
Architecture
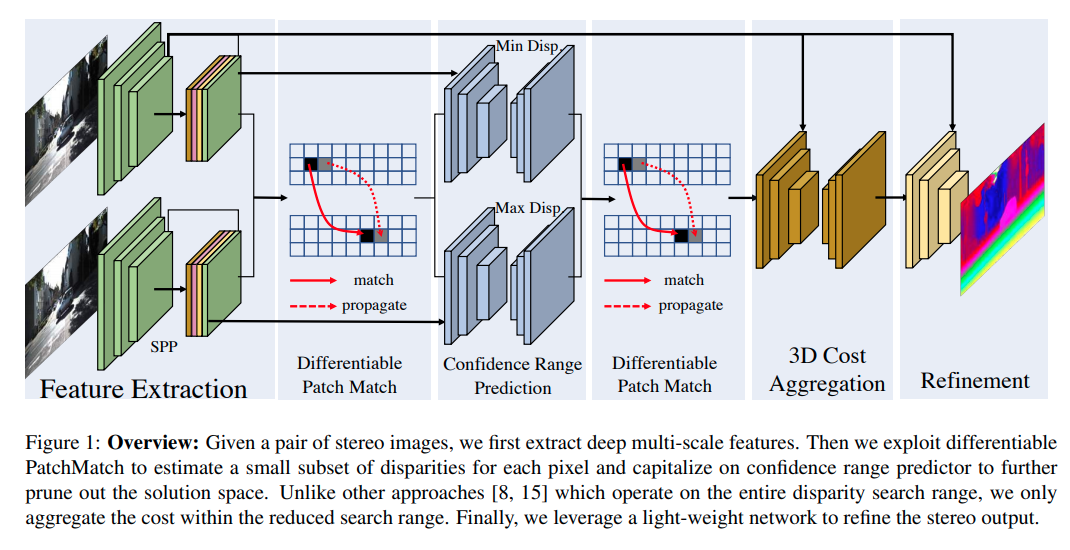
- 特征提取部分使用类似于PSMNet的结构
- Patch Match在后文
- Cost Aggregation与PSMNet一致,不过由于经过了pruning, 搜索范围更小
- Refinement, 使用左图的image-feature通过Conv2D后与Cost Softmax求expectation后的图片residual链接
Patch Match
Patch Match在本文的官方开源仓库里面可以被理解为是一个单独的大模块。
设计三个主要网络层:
Sampler Layer
随机抽样层,在图片上的每个点里面, 在当前搜索窗口内,生成个x方向的扰动值与个y方向的扰动值,最后形成在图片的每一个feature位置上,产生个disparity estimation。
Propagation Layer
传播层,这里有两个版本,返回值中,每一个feature map上点的特征包含了当前位置的disparity estimation以及相邻位置的disparity estimation. 使用基础版本的话,作者使用了一个预设的Conv3D,去提取紧邻上下左右的feature。 使用快速版本的话作者分两次propagate & evaluate, 分别对水平方向与竖直方向分开处理。
Evaluation Layer
评价层, 将右图特征根据randomly select的disparity estimation warp到左图上。然后由于在传播层的时候就已经将相邻的特征都聚集起来了,在评价层对每一个pixel计算左右图相邻特征的相似度。最后使用Softmax 求出各个disparity estimation的概率,并计算其expectation.
全局算法
迭代处理,sampler layer-> propagation layer-> evaluation layer.
从全局平均采样开始,在之后的每次迭代中,使用evaluation layer估计的expectation附近一定大小的窗口作为新的采样范围。最终每一个点的采样范围就被进一步地缩小。