Photorealistic Image Reconstruction From Hybrid Intensity and Event Based Sensor
这篇论文解决的任务如下,输入连续的普通图片以及一系列密集的event camera信息,还原出更加真实的原始图片,关于event camera的基础原理以及对图片的增强,这里可参考这篇论文
工作流程
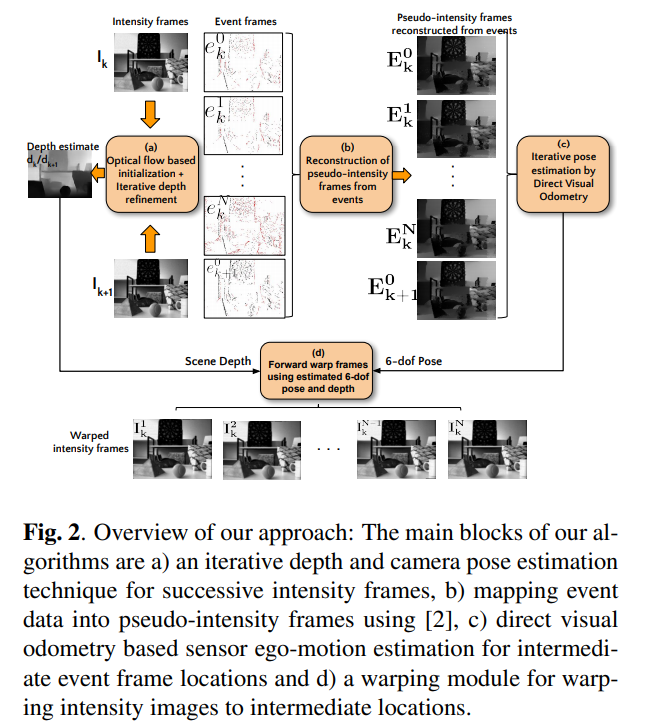 这里分为四个步骤,第一步是通过两张基础图片得到深度估计。第二步是使用event frames实现对中间帧的插值,第三步是对插值结果使用VO得到一个位姿估计,第四步是根据深度与姿态得到转换后的强度图。
这里分为四个步骤,第一步是通过两张基础图片得到深度估计。第二步是使用event frames实现对中间帧的插值,第三步是对插值结果使用VO得到一个位姿估计,第四步是根据深度与姿态得到转换后的强度图。
深度估计
通过光流初始化深度估计,将相对位移与旋转初始化为0,根据深度以及位移,可以让两张图相互转换,这里定义重构损失 进一步定义一个与edge有关的损失
其中为深度图指的是x,y方向的运算符,
优化以上两个损失函数的加权求和是一个非凸问题,我们需要一个好的局部解作为初始解。这里使用PWC-Net生成初始光流,这里使用光流的inverse直接得到深度初始值。
相对位移估计
这里使用event camera对两帧之间的图像进行插值,生成一系列的中间图像。
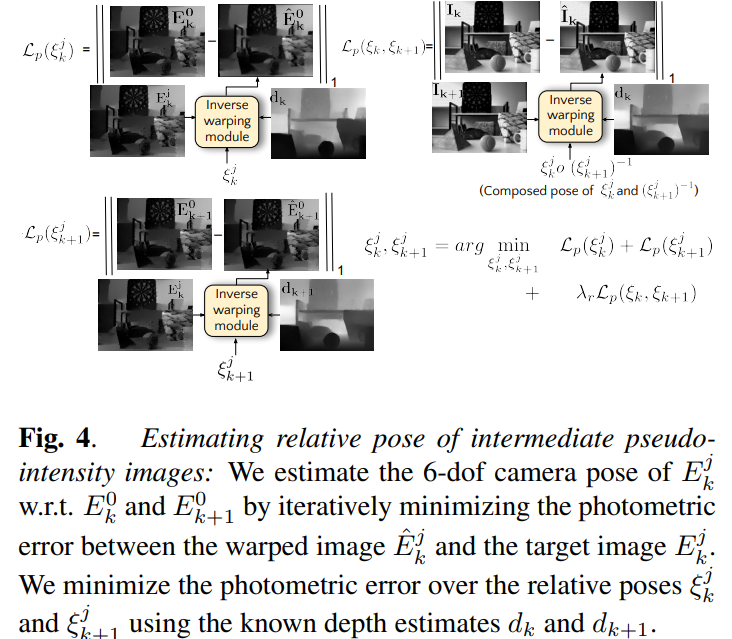
其中分别指代第张中间图相对于第一帧、下一帧之间的相对位姿变化,
融合
根据深度、多个中间值的位姿,将第一帧与第二帧分别向后、向前warp,alpha-blend两次的结果,得到一系列更精确的首尾与中间图。