Recent Collections for Stereo 3D detection
近期积攒了一系列双目3D检测paper的阅读。这里一次过进行记录,以结果排列为顺序。
这里列出目前有文章可寻的KITTI排行榜(2020.04.09)
Update: 2020.0409: Add Disp-RCNN and PL E2E. 2020.0714: Add CDN 2021.0126: Add RTS3D
| Methods | Moderate | Easy | Hard | Time |
|---|---|---|---|---|
| LIGAStereo | 64.66 % | 81.39 % | 57.22 % | 0.4 s |
| CDN | 54.22 % | 74.52 % | 46.36 % | 0.6 s |
| CG-Stereo | 53.58 % | 74.39 % | 46.50 % | 0.57 s |
| DSGN | 52.18 % | 73.50 % | 45.14 % | 0.67 s |
| EGFN | 46.39 % | 65.80 % | 38.42 % | 0.09 s |
| CDN P-LiDAR++ | 44.86 % | 64.31 % | 38.11 % | 0.4 s |
| Pseudo-LiDAR E2E | 43.92 % | 64.75 % | 38.14 % | 0.4 s |
| Pseudo-LiDAR++ | 42.43 % | 61.11 % | 36.99 % | 0.4 s |
| YOLOStereo3D | 40.71 % | 65.77 % | 29.99 % | 0.08s |
| Disp R-CNN (velo) | 39.34 % | 59.58 % | 31.99 % | 0.42 s |
| ZoomNet | 38.64 % | 55.98 % | 30.97 % | 0.3 s |
| OC Stereo | 37.60 % | 55.15 % | 30.25 % | 0.35 s |
| RTS3D | 37.38 % | 58.51 % | 31.12 % | 0.03 s |
| Pseudo-Lidar | 34.05 % | 54.53 % | 28.25 % | 0.4 s |
| Stereo R-CNN | 30.23 % | 47.58 % | 23.72 % | 0.3 s |
| RT3DStereo | 23.28 % | 29.90 % | 18.96 % | 0.08 s |
目录:
- Recent Collections for Stereo 3D detection
- LIGAStereo
- CG-stereo
- Pseudo-LiDAR E2E
- Pseudo-Lidar++
- Disp-RCNN
- ZoomNet
- OC Stereo
- RTS3D
- Pseudo-Lidar
- Stereo R-CNN
- RT3D Stereo
LIGAStereo
这篇paper是近期来性能第一个超过三/四年前点云检测的双目检测网络。性能上全面超越双目此前的网络。其主要思想是使用类似于 DSGN的网络, 但是于此同时,另外训练一个点云检测网络,两个网络输出受相同的监督损失训练,此外双目的cost volume分支在最后一层还会受点云最后一层的知识蒸馏训练。
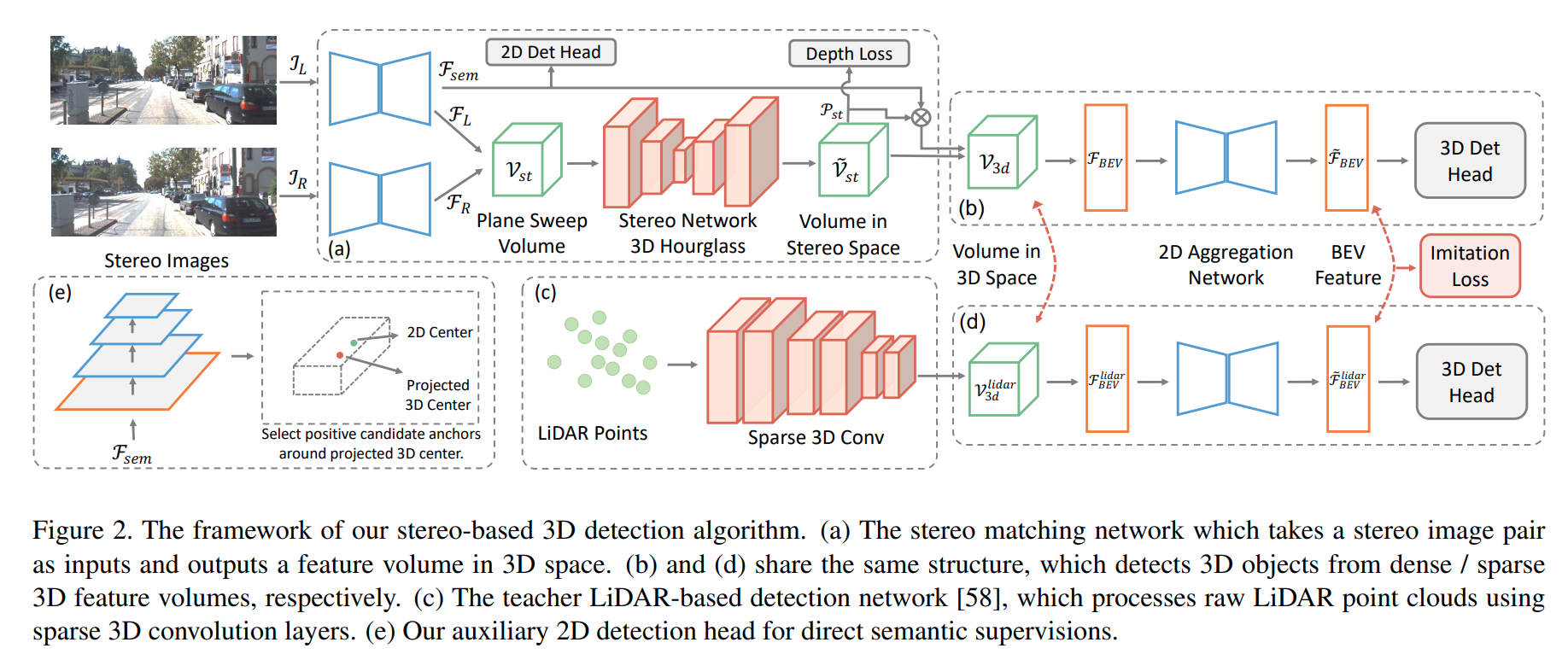
知识蒸馏损失:
CG-stereo
pdf
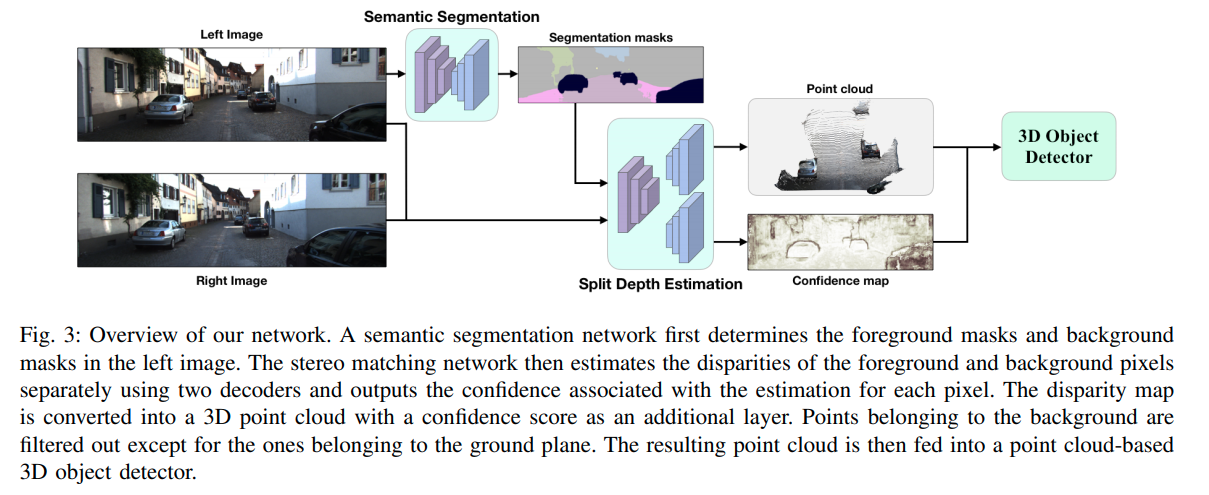 这篇paper来自于 Jason Ku那一组,是目前(2020.03.15)Stereo的SOTA,给pseudo-lidar系列提供了两个很有效的idea。
这篇paper来自于 Jason Ku那一组,是目前(2020.03.15)Stereo的SOTA,给pseudo-lidar系列提供了两个很有效的idea。
首先是双目估计中,forground与background的特性差距是很大的,作者认为应当使用两个分别的decoder处理前景与背景的物体,分叉的依据是语义分割的结果。
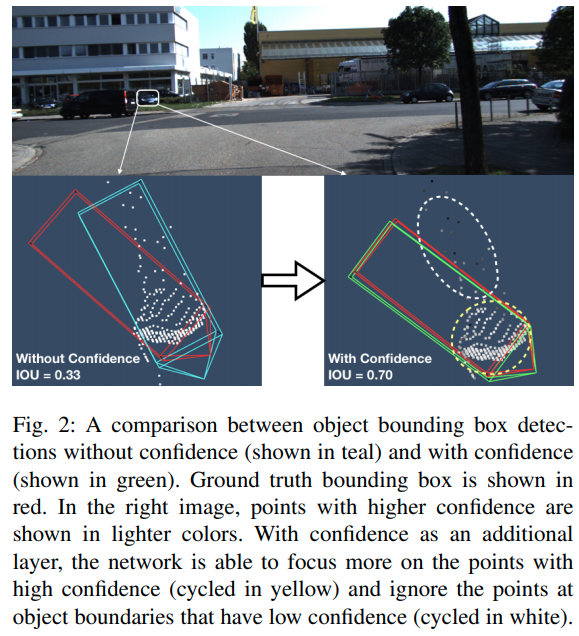
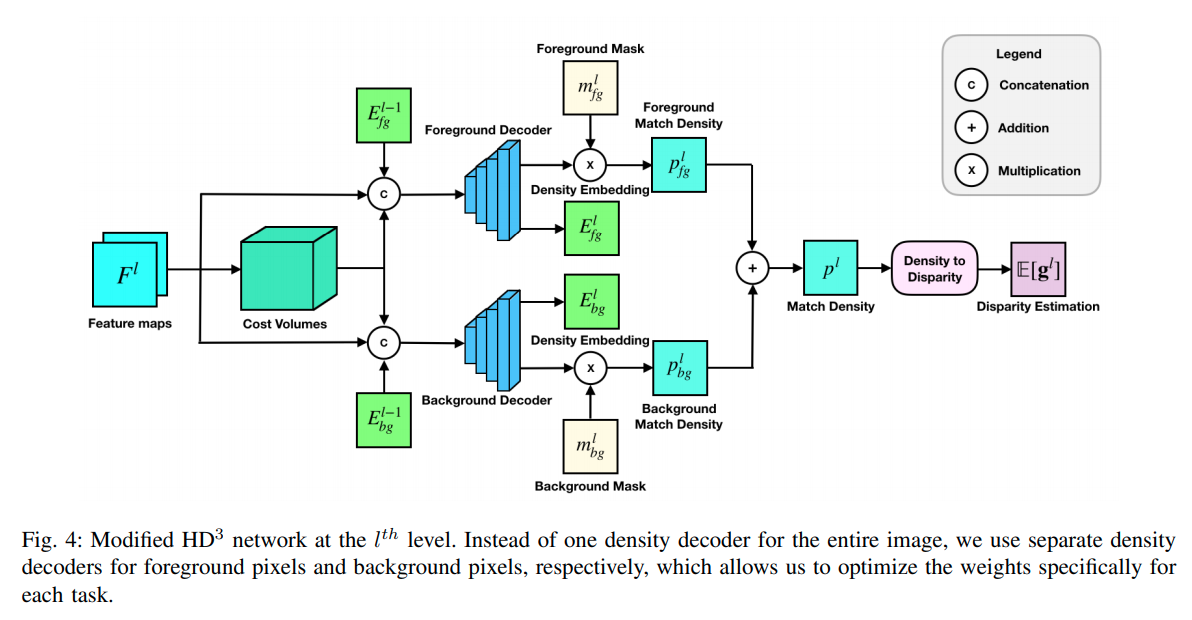 其次是双目估计得到的点之中有很多的噪音,不同点的confidence不同,对后端点云的影响很大,作者这里根据stereo matching的一个confidence map作为一个attention 层输入到点云后端处理中。
其次是双目估计得到的点之中有很多的噪音,不同点的confidence不同,对后端点云的影响很大,作者这里根据stereo matching的一个confidence map作为一个attention 层输入到点云后端处理中。
Pseudo-LiDAR E2E
这篇paper的贡献非常有意义,提到的是过去的Pseudo-lidar算法基本都是完全的二阶段算法,也就是双目生成点云与点云3D检测之间是无法End2End训练的,中间的转换过程是不可导的,因而尽管可以fine-tune,但是梯度的流动会中断,这篇paper的最大贡献在于提出一个CoR模块使得同时可以训练点云生成以及基于点云的物体检测。
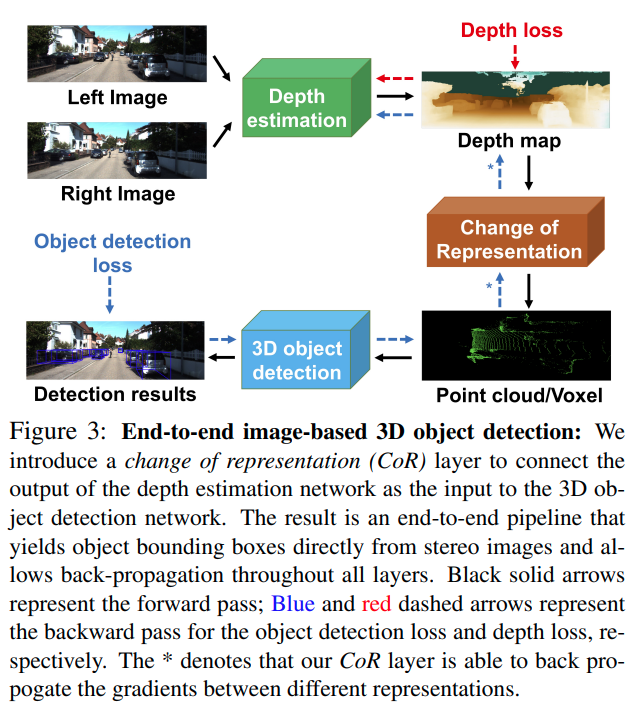
voxel里面每一个bin都对应一个基类,每一个bin是自己与周围的加权求和。从而voxel可导
Pseudo-Lidar++
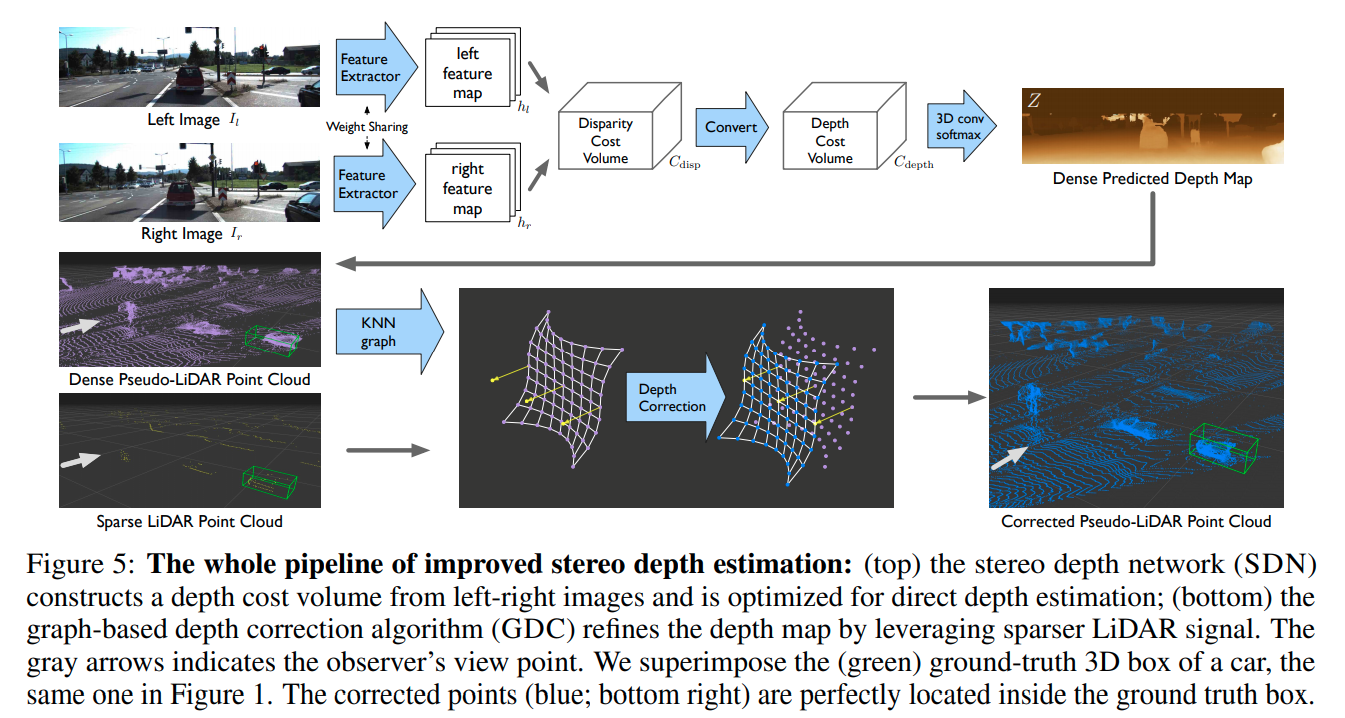
这篇paper的主要新意有两点
在深度估计上,作者给出一个新的insight,就是均匀的3D卷积很可能是disparity-based cost volome的一个error source,比如说对于disparity比较高的点,可以smooth out,但是对于disparity比较小的点则不应该同等级别的smooth out(会产生很大误差)。所以作者将disparity cost volume的深度方向求倒数,并线性插值得到depth cost volume,然后在depth cost volume上面做3D卷积。
在后处理上,作者融合了深度补全(depth completion)的思想,由于disparity是离散的,所以会引起很多不应该的误差,进而作者考虑使用低线数的lidar(开源的一个方案线数是4)作为一个ground truth的补偿。这里不进一步展开。
作者在KITTI上提交了两个成绩(PL++),标题下面给出的是春双目而没有GDC的成绩,有GDC的成绩会更高一些。
Disp-RCNN
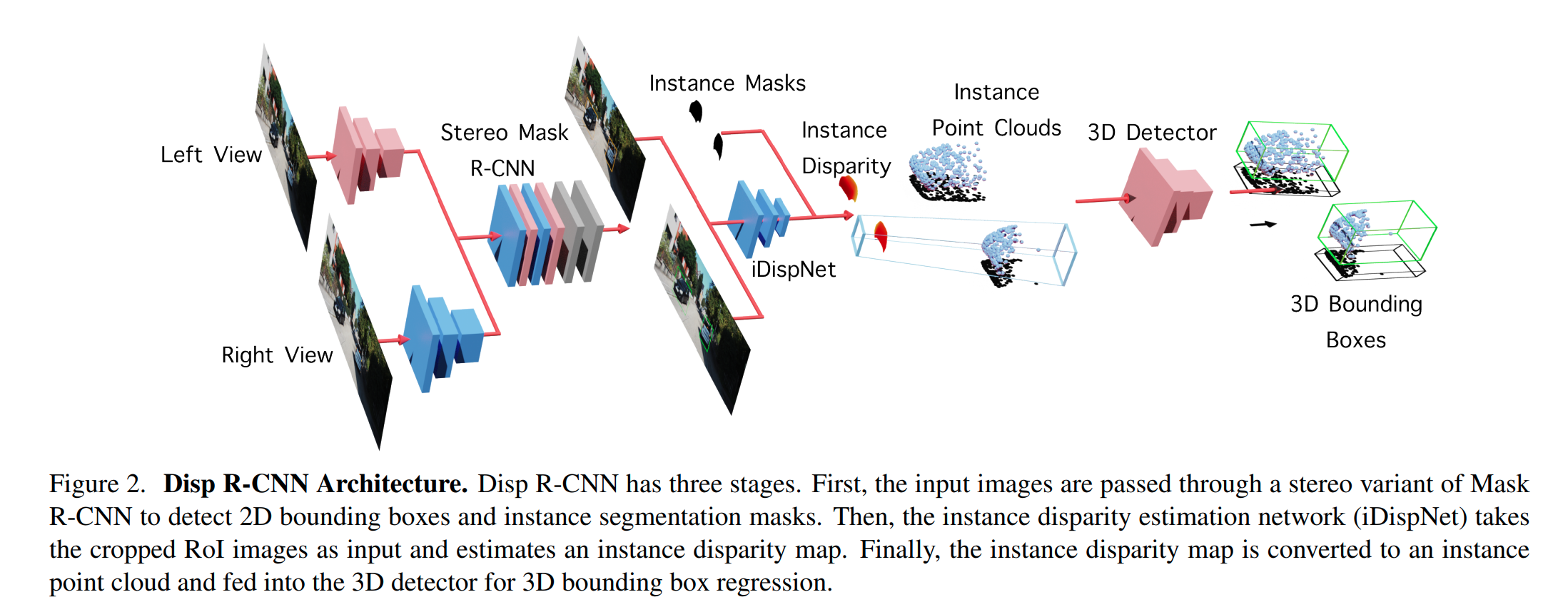
这篇paper的主要不同点在于使用RoIPooling从原图(作者指出不应该从feature中采样,因为Disparity要求邻近像素结果不同,但是Instance Segmentation会要求邻近像素结果相同)中采样,然后从Pooling后的结果重建Disparity以及局部点云(这个模块在数学处理上要小心),然后使用点云检测输出结果。
这篇paper还有使用pretrained的双目重建网络,得到密集的pseudo Ground Truth Disparity. Loss的构成比较复杂,具体看paper
ZoomNet
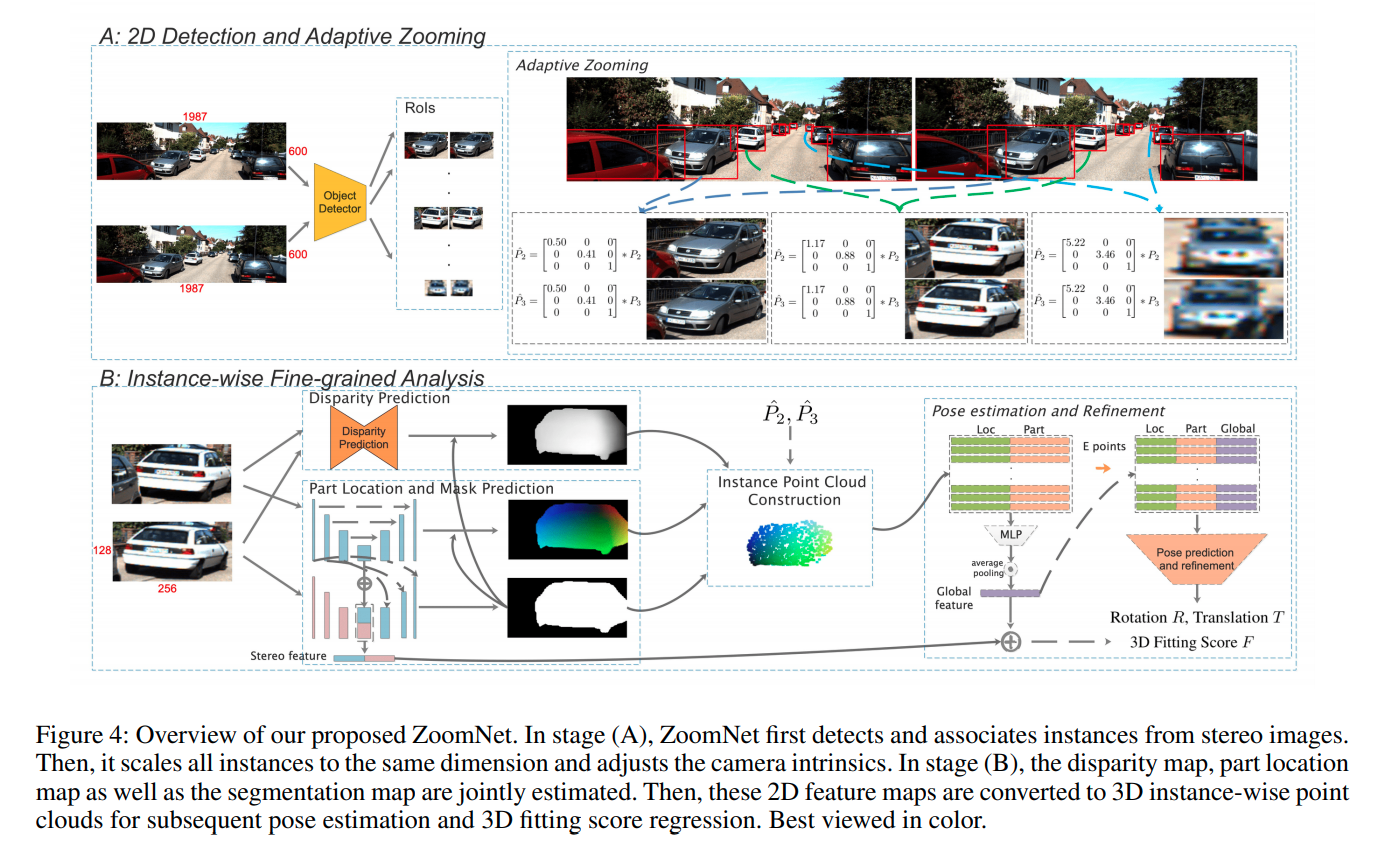
使用2D检测先得到两个车子咋图片的位置,然后分别resize,并且调节名义相机参数(zooming)。
中介辅助预测的内容包括disparity, instance segmentation, part location(每一个像素相对于车子中心x, y, z轴的位置,这个一般使用点云和稠密深度图进行标注)。得到点云后将feature 链接,然后用类似于point net的方式预测最终结果。
OC Stereo
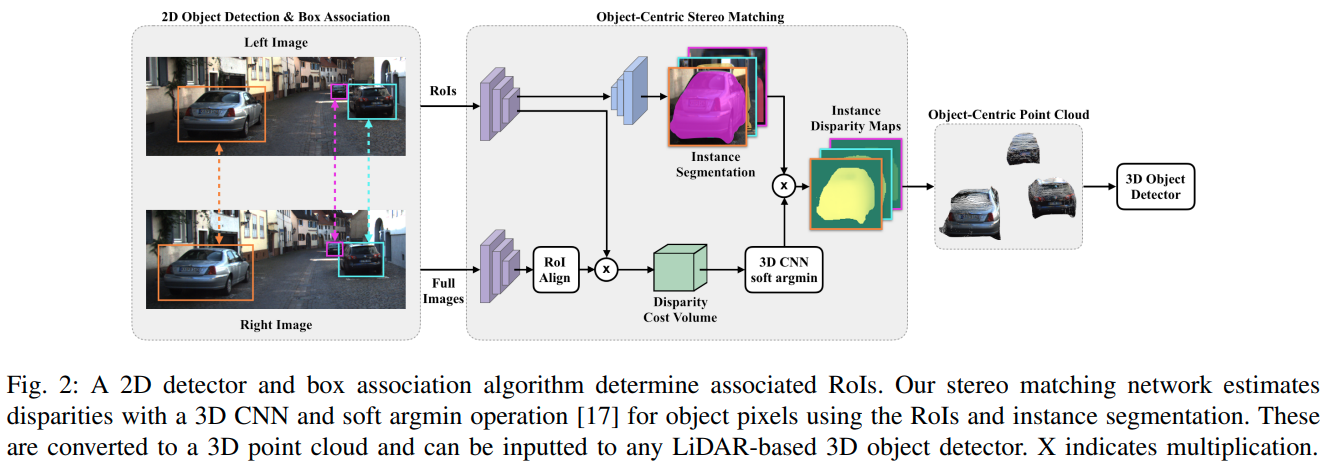
这篇paper的想法是使用RoIAlign将左右目两个区域的feature 提出来,然后使用instance seg与Cost volumn计算对应pixel处的disparity。
作者对于RoIAlign前后的segmentation pixel的位置关系做了很细致的解释。
在得到局部RGB点云之后作者使用AVOD 进行3D检测。
RTS3D
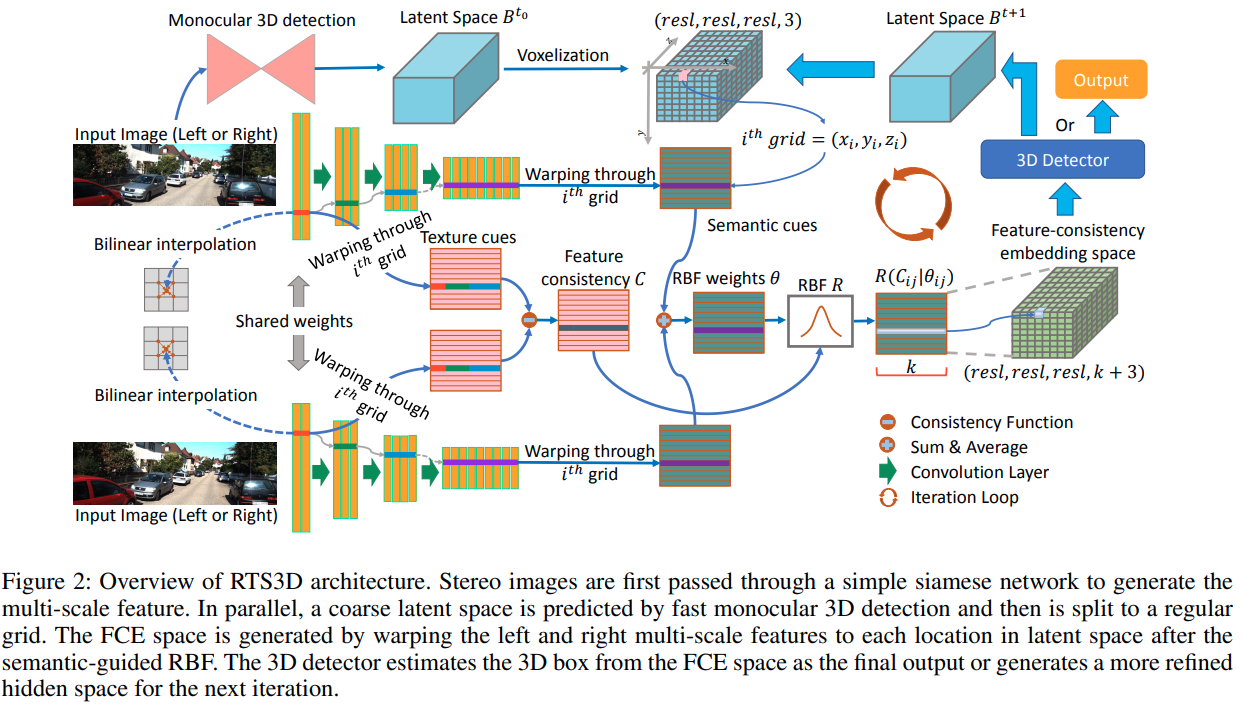
这篇paper推理时的操作是先让一个单目检测网络输出一个检测结果。 然后另外使用一个类似pointnet的机制去增强mono的结果.
- 用两个resnet分别输出两张图的feature
- 在predicted bounding box的附近生成一个cube voxel
- 根据calibration matrix以及cube voxel从双目Feature 上sample特征。
- 使用CNN处理sample得到的特征输出最终结果
Pseudo-Lidar
这篇paper理论上来说是pseudo-lidar的第一篇文章
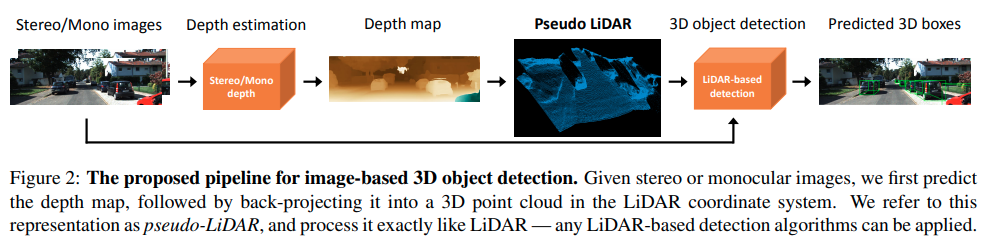
思路目前回看比较地直接,双目深度估计方面,作者使用pretrain PSMNet.注意这个PSMNet是在sceneflow数据集,以及training set的点云数据作为监督的。lidar 3D检测方面,作者使用AVOD
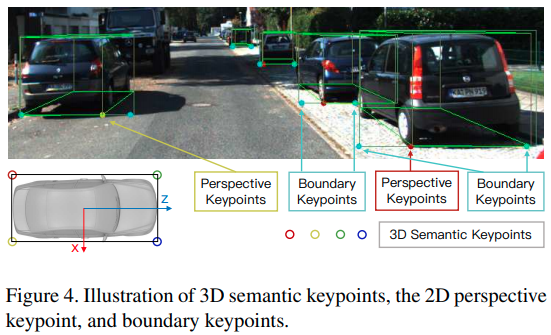
Stereo R-CNN
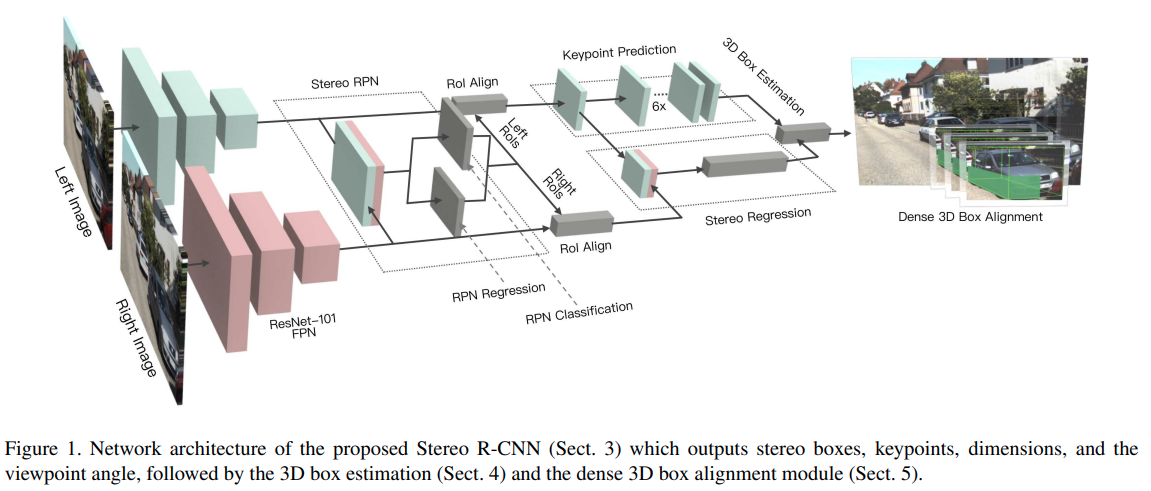
几个训练细节:
- positive anchors 的threshold提高了。
- 多预测一个Keypoint的位置,如下图
- SSIM,利用双目的disparity,后处理优化深度值。
RT3D Stereo
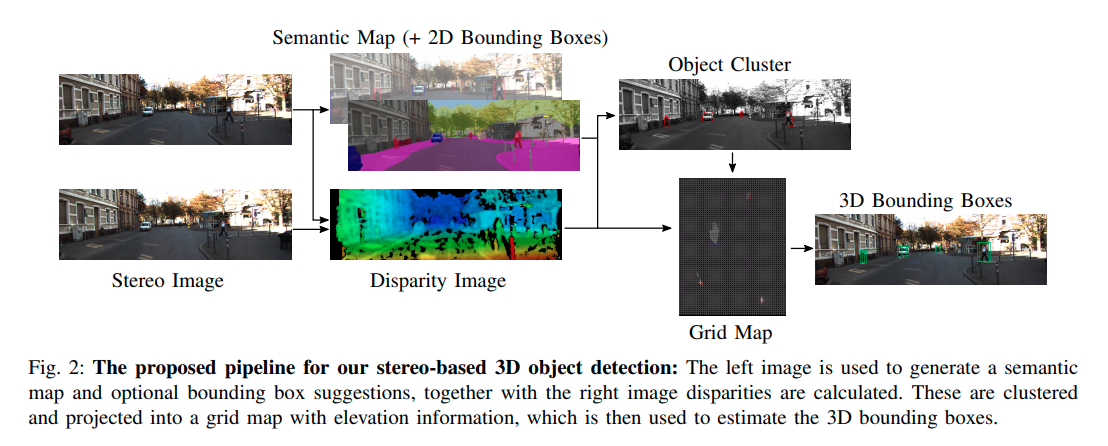
训练细节:
- 使用单一一个ResNet解决2D 检测以及语义分割的encoding.用的是二作作者的同时检测与语义分割网络.pdf
- Disparity使用的是block matching的传统方法,
- 作者根据语义分割以及detector结果分割出相关像素,然后聚类,然后以优化凸包的方式得出结果。由于作者没有开源,很多内容有待商榷。